

No campo do desenvolvimento robótico, encontrar o pacote ROS (Sistema Operacional de Robôs) adequado sempre foi um desafio. Diante de mais de 7.500 opções, as buscas tradicionais por palavras-chave geralmente retornam uma grande quantidade de resultados irrelevantes, desperdiçando tempo e energia dos desenvolvedores. Recentemente, pesquisadores da Universidade de Defesa Nacional e da Universidade de Zhejiang apresentaram um resultado inovador que oferece uma solução eficiente para esse problema.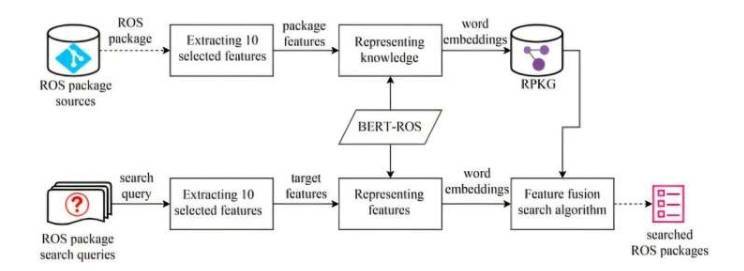
O estudo foi publicado na revista Frontiers of Computer Science. Os pesquisadores desenvolveram uma nova ferramenta que abandona o método simples de correspondência de palavras e adota a tecnologia de “grafo de conhecimento”, adicionando rótulos detalhados a cada pacote, abrangendo o tipo de robô para o qual é adequado, sensores suportados e funcionalidades. Assim, constrói-se um índice cuidadosamente organizado.
Nos testes diretos, esse método de busca orientada por semântica apresentou desempenho excepcional: sua precisão foi pelo menos 21% maior do que métodos populares como GitHub, Google (limitado a ROS ou GitHub), ROS Index e até mesmo o ChatGPT. Segundo o pesquisador principal, professor Mao Xinjun, com esse método semântico, os desenvolvedores conseguem encontrar o componente ROS correto em poucos segundos, em vez de horas como antes.
Esse modo mais inteligente de busca é extremamente significativo para o desenvolvimento robótico. Pesquisas mais rápidas e precisas permitem que os desenvolvedores dediquem mais tempo à criação de robôs inovadores, seja para sistemas de automação de armazéns, assistentes médicos ou guias interativos de museus. Além disso, a ferramenta de busca inteligente consegue recomendar antecipadamente drivers ou algoritmos adequados, evitando problemas de compatibilidade, reduzindo erros, otimizando testes e, por fim, melhorando o desempenho dos robôs.
A longo prazo, à medida que mais equipes compartilham e reutilizam pacotes de software open-source confiáveis, toda a comunidade robótica será beneficiada, acelerando seu progresso. Para órgãos de fomento e formuladores de políticas que visam um futuro impulsionado por robôs (como robôs de entrega autônomos ou companheiros de cuidados para idosos), investir moderadamente em “infraestrutura semântica” trará retornos consideráveis.
O “grafo de conhecimento de pacotes ROS” construído pela equipe conecta mais de 7.500 pacotes a mais de 32.000 atributos detalhados. Para garantir a precisão da busca, eles treinaram modelos de linguagem especializados capazes de interpretar corretamente termos específicos da robótica e realizaram comparações diretas com métodos existentes. O novo método aumentou em pelo menos 21% a probabilidade de posicionar pacotes corretos entre os primeiros resultados.
Durante a construção do “índice”, os pesquisadores coletaram informações do ROS wiki e de repositórios do GitHub, combinando técnicas baseadas em regras e correspondência aproximada para extrair detalhes estruturados, incluindo categorias de pacotes, hardware compatível e funcionalidades. Em seguida, ajustaram modelos de linguagem para que pudessem reconhecer com precisão termos como “RPLIDAR” ou “Gazebo”. Por fim, escreveram um algoritmo de busca que pontua os pacotes com base na quantidade de rótulos coincidentes com a consulta, evitando o inconveniente de navegar por páginas de resultados irrelevantes.
Com a robótica sendo cada vez mais integrada à vida cotidiana, esse motor de busca semântico ajudará os desenvolvedores a alcançar processos de criação mais suaves e sem erros, impulsionando a tecnologia robótica para novos patamares.