

Pesquisadores da Escola de Engenharia e Ciências Aplicadas John A. Paulson da Universidade de Harvard publicaram recentemente um novo estudo na revista *Advanced Materials*, apresentando uma tecnologia inovadora de impressão 3D para fabricar robôs macios. O método permite imprimir de uma só vez estruturas flexíveis complexas com canais ocos internos, oferecendo uma nova abordagem para simplificar o design e controle de robôs macios.
A fabricação tradicional de robôs macios geralmente depende de processos de moldagem por fundição e encapsulamento multicamadas, que são complicados e difíceis de controlar com precisão. A equipe de pesquisa, liderada pelo estudante de pós-graduação Jackson Wilt e pela ex-pesquisadora de pós-doutorado Natalie Larson, baseou-se na tecnologia de impressão 3D multimaterial rotativa desenvolvida anteriormente pelo laboratório de Jennifer Lewis para alcançar a formação direta da estrutura. A técnica extrusa simultaneamente múltiplos materiais através de um único bico e utiliza rotação precisa durante a impressão para personalizar a distribuição e o padrão dos materiais.
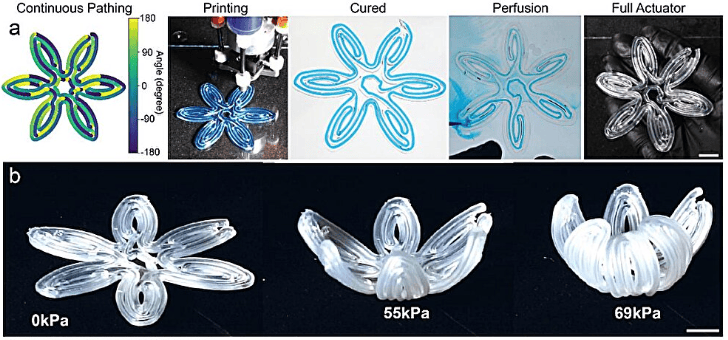
"Usamos dois materiais da mesma saída, e podemos controlar a direção de flexão do robô quando inflado através da rotação," explicou Wilt. "Nosso objetivo é criar robôs biomiméticos macios para várias aplicações." A equipe utilizou poliuretano como material da casca e poloxâmero, um polímero comumente usado em géis para cabelo, para formar o canal interno solúvel. Após a impressão, o material do núcleo interno é lavado, formando uma rede com canais ocos de precisão. Ao pressurizar esses canais com ar, toda a estrutura pode dobrar e deformar de maneira controlada e pré-programada.
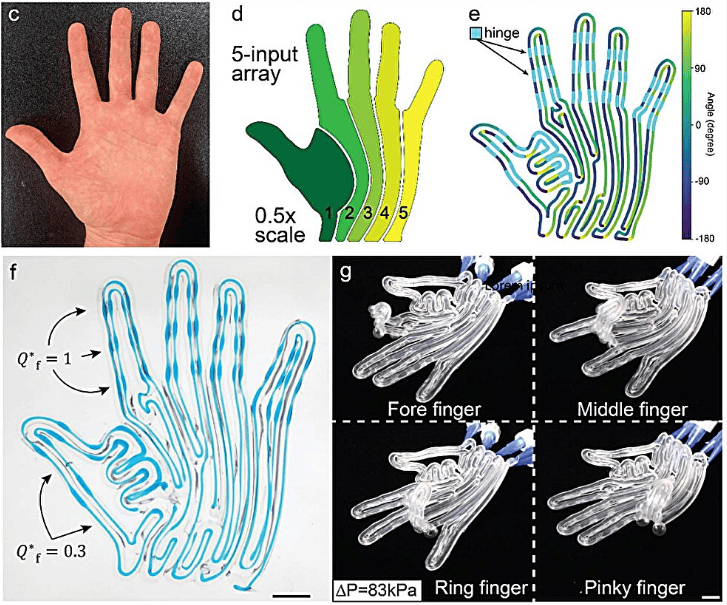
Este processo de fabricação integrada evita a dependência de moldes dos métodos tradicionais, simplificando significativamente o fluxo de produção. Wilt destacou: "Neste trabalho, não precisamos de moldes. Imprimimos a estrutura, a programamos rapidamente e podemos personalizar rapidamente o método de acionamento." A equipe já utilizou a tecnologia para fabricar com sucesso estruturas planas com padrões complexos e dispositivos de preensão com múltiplos 'dedos' e 'articulações' dobráveis, demonstrando seu potencial para fabricar atuadores macios com capacidade de deformação controlável.
O estudo oferece uma solução de fabricação eficiente e personalizável para o desenvolvimento de robôs macios aplicáveis em áreas como assistência médica, manipulação de precisão e preensão flexível. Wilt afirmou que esta tecnologia de fabricação rápida pode ter amplas perspectivas de aplicação em futuros robôs cirúrgicos e dispositivos de assistência humana.
Mais informações: Autores: Jackson K. Wilt et al., Título: *Impressão 3D Multimaterial Rotativa de Materiais para Robôs Macios com Dispositivos Pneumáticos Assimétricos Embebidos*, Publicado em: *Advanced Materials* (2025). Informação da revista: Advanced Materials