

Pesquisadores chineses, em colaboração com a empresa de robôs de IA Galbot, desenvolveram um sistema chamado LATENT capaz de ensinar robôs humanoides a jogar tênis. O sistema utiliza dados de movimentos humanos imperfeitos, coletando cinco horas de vídeos de habilidades de tênis de jogadores amadores para construir um espaço de ação latente e é treinado usando aprendizado por reforço, sendo finalmente implantado no robô Unitree G1. Esta abordagem inovadora visa superar os desafios de robôs replicarem habilidades de esportes competitivos, como movimentos dinâmicos e demandas de alta precisão.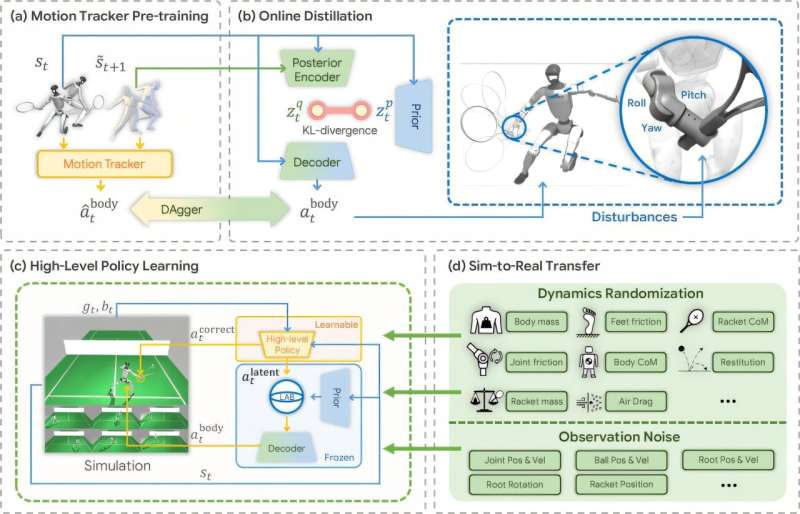
A equipe de pesquisa descreveu o sistema LATENT no servidor de pré-impressão arXiv. O sistema reduz a dificuldade de aprendizado processando dados fragmentados de movimentos humanos, como golpes de forehand, backhand e habilidades de movimento. Os autores do estudo explicaram: "Nossa percepção fundamental é que, embora imperfeitos, esses dados quase reais ainda fornecem informações prévias sobre as habilidades primárias humanas em cenários de tênis. Através de correções e combinações adicionais, aprendemos uma política humanoide que pode, de forma consistente, rebater bolas recebidas em uma ampla gama de condições e devolvê-las a uma posição-alvo, mantendo um estilo de movimento natural."
Em testes em quadras reais, o robô humanoide demonstrou a capacidade de jogar contra humanos, utilizando golpes de forehand e backhand, e se adaptando a diferentes áreas da quadra. Após 10.000 tentativas, o sistema LATENT superou métodos anteriores em termos de taxa de sucesso, precisão e naturalidade do movimento, alcançando uma taxa de sucesso de até 96,5%. A equipe apontou que o sistema ainda tem espaço para melhorias, como incorporar visão ativa para reduzir a dependência de captura de movimento e expandir o conjunto de tarefas para se aproximar mais de um jogo real.
Os desenvolvedores do sistema LATENT afirmam que a estrutura pode ser aplicada a outros esportes ou tarefas, especialmente quando faltam dados perfeitos de movimentos humanos. Este avanço oferece um novo caminho para robôs aprenderem habilidades competitivas, com potencial para impulsionar o desempenho de robôs humanoides em ambientes dinâmicos.
Detalhes da publicação: Autor: Krystal Kasal, Phys.org; Título: «Humanoid robot learns impressive tennis skills from imperfect human motion»; Publicado em: «arXiv» (2026).