

Quando o sinal do Sistema Global de Navegação por Satélite é completamente interrompido, como é que uma carregadora de mina subterrânea se desloca autonomamente por galerias sinuosas e estreitas, movendo-se rapidamente entre áreas de trabalho densas, como frentes de lavra e pontos de descarga? Durante muito tempo, a navegação autónoma de carregadoras subterrâneas dependeu da navegação absoluta (AN) ou da navegação reativa (RN). A primeira é propensa à acumulação de erros em sucessivas viragens, enquanto a segunda carece de capacidade de orientação global em troços longos e retos. Uma equipa conjunta da Universidade de Chongqing, Universidade Central do Sul, Universidade de Fuzhou e outras propôs recentemente uma estratégia de navegação híbrida, que integra de forma colaborativa no espaço e no tempo a localização precisa de mapas pré-existentes com as vantagens da perceção dinâmica de sensores em tempo real, resolvendo pela primeira vez numa única estrutura o problema de "não se perder nas curvas e não derivar nas retas" em operações subterrâneas profundas.
Precisão absoluta, mas com "deriva"; reação ágil, mas com "cegueira"
As LHD são o equipamento central da extração sem carris em minas subterrâneas, responsáveis por carregar o minério da frente de lavra e transportá-lo pelas galerias até ao ponto de descarga. A operação tripulada tradicional enfrenta riscos de poeira elevada, humidade, ruído e até desabamentos, tornando urgente a transição para a autonomia.
Em ambientes subterrâneos, o sinal GPS é completamente bloqueado. Atualmente, existem duas vias técnicas principais:
A navegação absoluta depende de LiDAR/Unidade de Medição Inercial em conjunto com um mapa pré-construído, apresentando vantagens claras nas curvas das galerias e permitindo uma localização precisa ao nível do centímetro. No entanto, o problema reside no facto de, durante operações prolongadas, perturbações como erros de direção mecânica, desgaste dos pneus e assentamento da suspensão tenderem a causar uma acumulação gradual de erros — ao entrar numa galeria estreita, uma localização absoluta "demasiado confiante" pode fazer o veículo raspar nas paredes laterais ou até ficar encravado na galeria.
A navegação reativa, pelo contrário, não depende de mapas pré-existentes, percecionando o ambiente de forma totalmente dinâmica através de sensores em tempo real (LiDAR, câmaras de visão, sensores ultrassónicos) e ajustando-se instantaneamente. É flexível e eficiente em troços retos e abertos, mas ao entrar em terrenos com múltiplos cruzamentos ou curvas fechadas, como não consegue obter uma orientação global, tende a "perder-se" — escolhendo a saída errada ou até entrando em zonas mortas de loop.
A equipa do primeiro autor do artigo analisou profundamente este dilema: "A navegação absoluta e a navegação reativa têm, cada uma, as suas vantagens, mas seja o seguimento de trajetória único, seja a perceção puramente em tempo real, é difícil cobrir totalmente o ambiente subterrâneo complexo e mutável." Como integrar as duas tecnologias numa única carregadora e alternar autonomamente entre elas em diferentes troços da galeria tornou-se o principal gargalo para a navegação autónoma de LHD passar da teoria para a implementação em engenharia.
Implementação colaborativa, aproveitando o melhor de cada — da "escolha de um" à "comutação automática"
A 20 de abril de 2026, uma equipa de investigação conjunta da Faculdade de Recursos e Engenharia de Segurança da Universidade de Chongqing, da Faculdade de Recursos e Engenharia de Segurança da Universidade Central do Sul, da Faculdade de Geologia e Minas Zijin da Universidade de Fuzhou e da Shenzhen Zhongjin Lingnan Nonfemet Company Limited, entre outras, publicou os resultados da sua investigação na revista internacional de robótica de referência Journal of Field Robotics, propondo pela primeira vez uma estratégia de navegação híbrida. A inovação central desta estratégia reside na implementação colaborativa das vantagens da navegação absoluta e da navegação reativa no tempo e no espaço.
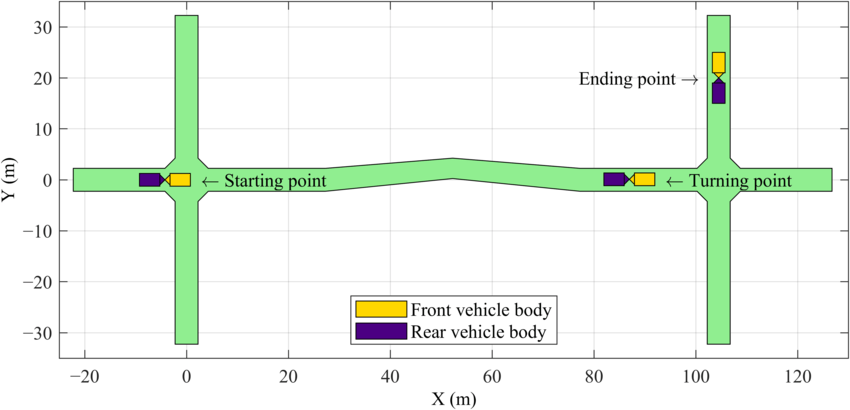
Design central: Uma lógica de comutação espaço-temporal em que "a navegação absoluta é responsável pelas curvas e a navegação reativa pelas retas", alcançando uma seleção de modo ótima e autónoma. Nas curvas das galerias, o sistema baseia-se no mapa pré-construído para uma localização precisa, conseguindo um seguimento de trajetória fiável graças às características geométricas conhecidas do ambiente; uma vez concluída a curva e ao entrar numa galeria longa e reta, o sistema comuta automaticamente para a navegação reativa, deixando de depender da localização absoluta e ajustando a trajetória instantaneamente apenas com dados de LiDAR e odometria em tempo real, realizando assim o princípio de "usar 'munição de precisão' apenas quando necessário e mudar para 'cruzeiro de baixo consumo' em troços estáveis".
Verificação experimental: Os testes de simulação mostraram que esta navegação híbrida é significativamente superior ao uso isolado de AN ou RN, tanto na precisão em curvas de galerias estreitas como na robustez em retas. Os testes de campo em frentes de lavra reais validaram ainda mais a capacidade de estabilidade do sistema em condições de trabalho reais: a carregadora pode atingir uma velocidade de cerca de 1,8 m/s em troços retos e 0,6 m/s em curvas, em galerias estreitas típicas, mantendo ao mesmo tempo uma operação estável sob interferência de alta densidade de poeira, baixa iluminação e múltiplos obstáculos.
De "solução única" a "arquitetura de fusão" — uma mudança de paradigma na navegação autónoma de LHD
A essência desta investigação é evoluir o sistema de navegação da LHD de uma solução fixa para uma arquitetura de fusão "adaptativa à via". A um nível mais profundo, a estratégia HN, ao alternar módulos de navegação com princípios diferentes em troços distintos, forma um design de robustez generalizável — mesmo que um dos módulos sofra uma degradação instantânea de desempenho sob condições extremas como poeira densa, acumulação de água e múltiplas fontes de interferência, o outro módulo pode assumir a localização ou o desvio de obstáculos, garantindo que a missão não é interrompida. Ou seja, a HN não se limita a manter dois sistemas, mas fá-los cooperar em sequência no eixo do tempo, eliminando conjuntamente o erro acumulativo da navegação absoluta pura e o risco de "se perder" da navegação reativa pura.
O artigo salienta ainda que a característica da estratégia de ajustar a trajetória de forma independente nos troços retos, "sem depender da localização absoluta", abre novas possibilidades para expansões futuras. Isto deixa uma interface para a futura introdução de algoritmos de manutenção de faixa mais leves ou mesmo esquemas de sensores distribuídos auxiliares em galerias longas e retas — significando que a HN não só resolve o problema atual, como também possui uma base arquitetural para iteração e expansão contínuas. Para as minas reais, atingir de forma estável as velocidades mencionadas num ambiente subterrâneo sem GPS significa também que a LHD possui uma capacidade de engenharia para substituir genuinamente o trabalho humano em processos-chave como a mudança de turno no subsolo e o transporte nas frentes de lavra.
O motor de base para a extração em profundidade
À medida que a profundidade de extração na China continua a aumentar, com a redução da largura das curvas das galerias, o agravamento do calor nocivo e da poeira, e a atenuação das comunicações, os riscos e os desafios de conforto da operação manual tradicional aumentam continuamente. A navegação autónoma tornou-se uma necessidade absoluta para a operação não tripulada em frentes de lavra profundas e de forte inclinação. O valor da estratégia de navegação híbrida reside precisamente nisto — não depende de infraestruturas de localização externas como 5G ou UWB, conseguindo deslocar-se autonomamente apenas com sensores de bordo e mapas pré-construídos, sendo extremamente adequada para poços profundos com grave atenuação de comunicações, e com um custo de implementação muito inferior ao das alternativas que exigem a cobertura total com estações base de localização. Simultaneamente, a capacidade redundante de "localização + desvio de obstáculos" fornecida pela HN também oferece uma base de segurança para a operação colaborativa entre a carregadora e outros veículos de baixa altura em zonas cegas de sensores no subsolo, trazendo novas garantias para as operações mistas subterrâneas.
Em aplicações práticas, com a contínua redução dos custos de sensores e capacidade de computação, a solução de navegação autónoma para LHD baseada na estrutura HN está também a evoluir de "conseguir andar" para "andar de forma estável, duradoura e segura".
Construir uma capacidade de "alicerce" sólida para minas não tripuladas
O planeamento de trajetória, a precisão de localização e a robustez operacional da LHD são elos cruciais para a automação da extração subterrânea passar da "demonstração de uma única máquina" para a "implementação real". A estratégia HN oferece uma solução centrada no "princípio ótimo adaptativo", que não se limita às LHD, podendo ser alargada a outros equipamentos sem carris subterrâneos, construindo uma "plataforma de navegação universal" em ambientes de extração profunda sem GPS, com múltiplas galerias ramificadas e fontes de perturbação complexas.
Pode dizer-se que a estratégia de navegação híbrida dá, pela primeira vez, às carregadoras de minas subterrâneas a dupla confiança de "saber onde estão" e "saber para onde ir". Isto representa não só um avanço face ao dilema da "escolha de um" na navegação autónoma subterrânea, como também fornece uma solução técnica de base robusta, implementável e expansível para a mina inteligente transitar do controlo remoto à distância para uma extração autónoma genuína.