

Com o aumento anual da profundidade da mineração de carvão na China, o espaço de trabalho subterrâneo torna-se cada vez mais restrito. Os braços mecânicos rígidos tradicionais e os robôs com rodas ou lagartas, devido ao seu grande volume e flexibilidade insuficiente, têm dificuldade em realizar tarefas de inspeção, manutenção e resgate em áreas complexas como galerias estreitas, fendas de desabamento e valas de cabos e tubulações. Um importante artigo de revisão, publicado por uma equipa de investigação de instituições como a China Coal Technology & Engineering Group e a Universidade de Ciência e Tecnologia de Xi'an na principal revista chinesa do setor de tecnologia mineira internacional, "Coal Science and Technology", sistematiza a base teórica, as tecnologias-chave e as perspetivas de aplicação em engenharia dos robôs serpente em operações subterrâneas de minas de carvão. Como um novo tipo de robô biomimético, o robô serpente supera as limitações de movimento dos braços mecânicos rígidos tradicionais, combinando alta flexibilidade com adaptabilidade à prova de explosão em minas de carvão, demonstrando um potencial de aplicação significativo em cenários como inspeção subterrânea, manutenção de equipamentos e resgate de emergência. Este artigo analisa em profundidade os destaques técnicos e as direções futuras desta investigação inovadora.
Avanço Biomimético: O Salto Tecnológico da "Cópia Estrutural" para o "Domínio do Movimento"
A contribuição central desta investigação reside na construção de um sistema teórico de tecnologias-chave para robôs serpente orientado para espaços confinados subterrâneos em minas de carvão, quebrando a limitação paradigmática dos equipamentos móveis tradicionais de "movimento rígido, função única".
Classificação de Configurações e Limites de Aplicação: Um Retrato Preciso dos Três Tipos
A equipa de investigação, partindo da classificação estrutural e características, sistematizou as vantagens e os limites de aplicação das três principais configurações de robôs serpente: discreta, serpentina e contínua. Os robôs discretos são constituídos por módulos unitários ligados em série, com forte capacidade de reabilitação e renovação, sendo fáceis de reparar; os serpentinos baseiam-se num design de juntas telescópicas, permitindo um controlo de posição de alta precisão; os contínuos possuem maior flexibilidade geral, podendo estender-se por canais curvos complexos. Para diferentes cenários de espaços confinados, como áreas de goaf, galerias de drenagem inferiores e interior de tubos de drenagem em minas de carvão, cada uma das três configurações tem os seus pontos fortes, fornecendo um mapa claro para a seleção de equipamentos sob diferentes condições de trabalho.
Modelação Cinemática e Dinâmica: Decifrando o Código de Controlo de Sistemas Altamente Redundantes
A nível teórico, a equipa de investigação sistematizou os métodos de modelação cinemática e dinâmica para sistemas altamente redundantes. Focando-se nos desafios de controlo decorrentes de ambientes dinamicamente incertos e da interação com terrenos complexos, enfatizou-se a necessidade de controlo não linear, controlo robusto e mecanismos de operação em modo degradado. Através do estabelecimento de modelos matemáticos entre ângulos das juntas, velocidade das rodas e obstáculos do terreno, combinados com algoritmos de movimento assistido por graus de liberdade redundantes, o robô serpente pode alcançar passadas de rastejamento e viragem mais suaves e estáveis em áreas com obstáculos ultrabaixos, como galerias inclinadas e valas de tubagens.
Fusão de Perceção Multimodal e Navegação com Comunicações Limitadas: Avançar "Sem Janelas" em Ambientes de Névoa Densa
O subsolo das minas de carvão é um ambiente típico com comunicações limitadas, onde poeira, névoa de água e campos magnéticos fortes interferem gravemente nos sinais sem fios tradicionais. A equipa de investigação resumiu a aplicabilidade em engenharia de soluções de fusão de sensores multimodais, como LiDAR, câmaras de profundidade e unidades de medição inercial, superando as limitações de perceção de sensores únicos. Simultaneamente, com a ajuda de sistemas embarcados com capacidade de computação na borda, realiza-se a navegação autónoma e o planeamento de trajetória em ambientes locais de baixa velocidade, melhorando significativamente a capacidade de deteção e desvio de obstáculos do robô em condições de zona cega.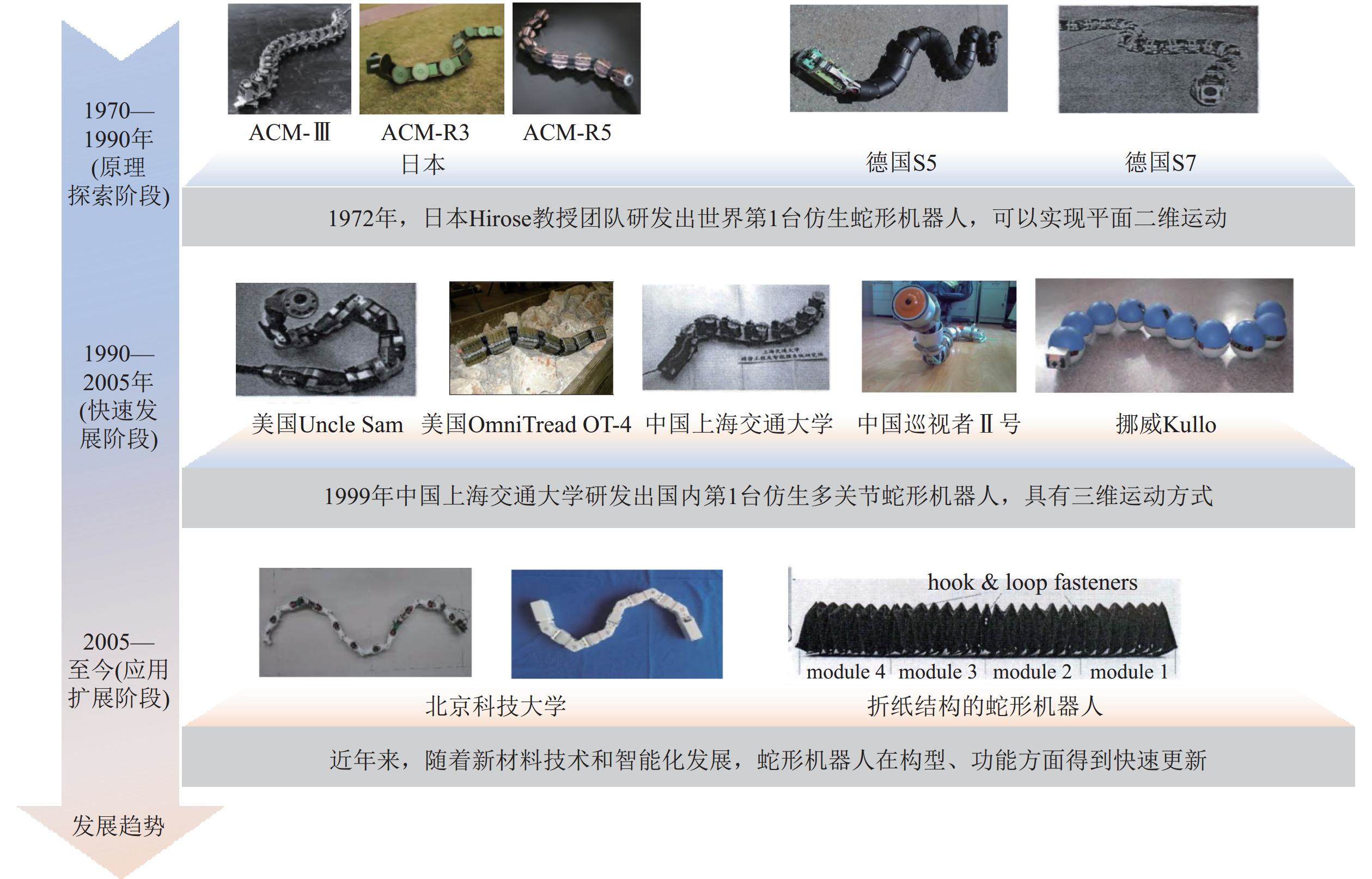
Enfrentando os Estrangulamentos: A Aplicação Industrial Ainda Precisa de Superar "Três Grandes Montanhas"
Ao mesmo tempo que afirma o enorme potencial de aplicação, a investigação também aponta pragmaticamente os principais estrangulamentos que os robôs serpente ainda enfrentam na sua promoção industrial em larga escala nas minas de carvão:
O Conflito de Engenharia entre Proteção contra Explosão e Leveza: O risco de explosão de metano nas minas de carvão é elevado, e os invólucros à prova de explosão aumentam frequentemente de forma significativa o peso e o volume do equipamento, o que contraria a sua necessidade inerente de leveza e alta flexibilidade. Como alcançar um design de leveza extrema garantindo a segurança intrínseca é a primeira barreira para a implementação em engenharia.
A Fusão Estável de Informação Multissensorial: A escuridão e a poeira densa no subsolo das minas de carvão fazem com que o grau de confiança dos diferentes sensores varie enormemente em ambientes distintos, resultando numa estabilidade e sinergia insuficientes na fusão de perceção de múltiplas fontes.
Localização de Alta Precisão e Decisão Autónoma sob Limitações de Comunicação: Em espaços subterrâneos profundos sem cobertura GPS ou mesmo UWB, como alcançar uma localização de alta precisão e tomar decisões autónomas com restrições de risco é o problema "estrangulador" que limita a operação independente.
A Tendência Inevitável da "Inteligência de Ponto Único" para a "Integração de Sistemas"
Apesar destes desafios, a rota tecnológica chave proposta pela investigação aponta claramente a direção para a próxima fase de competição na inteligência das minas de carvão. Olhando para o futuro, com o estabelecimento de novas plataformas como a "Base de Testes Intermédios de Robótica Inteligente Incorporada de Guangdong-Hong Kong-Macau" da Academia de Ciência e Tecnologia do Carvão, e o aperfeiçoamento dos ambientes de simulação de testes complementares, a implementação industrial dos robôs serpente está a entrar numa via rápida.
Inspeção Contínua em Espaços Confinados: Ver Profundamente, Ver com Precisão
Em pontos de risco de difícil acesso para o pessoal, como galerias de transportadores de correia, interior de tubagens seladas e bordas de áreas de goaf, o robô serpente pode transportar câmaras de alta definição, câmaras termográficas e vários sensores de gás para realizar inspeções cíclicas automatizadas. A equipa de investigação salienta que, utilizando dados históricos existentes para criar uma grande base de dados, combinada com algoritmos de IA, é possível alertar precocemente para temperaturas elevadas de equipamentos ou anomalias de gás, realizando o salto da "inspeção" para a "inspeção inteligente".
Resgate de Emergência em Ambientes Complexos: Ser Pioneiro, Salvar Vidas
Quando ocorre um desastre, o robô serpente, com o seu corpo esguio e juntas altamente flexíveis, pode penetrar nas fendas de escombros após uma grande explosão de gás ou colapso por inundação, explorando sinais vitais antes da equipa de salvamento e estabelecendo retransmissores de comunicação de emergência temporários. Este é um valor único e incomparável que nenhum outro robô rígido ou método de resgate manual pode oferecer.
Operação Auxiliar em Frentes de Lavra Totalmente Mecanizadas Não Tripuladas: Integração Homem-Máquina Colaborativa
Sob a grande tendência de mineração de carvão inteligente e não tripulada, progressivamente implementada, os braços serpente serão acoplados a máquinas de perfuração ou suportes hidráulicos, desempenhando um papel auxiliar miniaturizado e com alta amplitude de movimento no tratamento de parafusos de ancoragem soltos, falhas em cabos e tubulações ou deteção de estruturas internas, reduzindo significativamente o risco de contacto direto do pessoal em setores de alto risco.
A Construção de um Novo Ecossistema de "Inteligência Artificial + Equipamentos de Mina"
A investigação sublinha, por fim, que o futuro robô serpente para minas de carvão não será apenas um hardware isolado na frente de trabalho, mas deverá integrar-se plenamente no sistema de "inteligência incorporada" da mina. Através da implementação de grandes modelos na nuvem, controlo remoto 5G e agendamento distribuído de tarefas, um único corpo de robô serpente poderá realizar atualizações instantâneas de modelos e partilha de conhecimento em diferentes terminais de minas, aumentando enormemente a eficiência de utilização e a capacidade de resposta do equipamento entre múltiplas minas.
Consolidar a Base da Segurança na Produção com "Sabedoria Flexível"
O valor profundo desta investigação reside em alterar fundamentalmente o modo de interação homem-máquina nos espaços subterrâneos de alto risco na China. Embora o número total de acidentes em minas na China tenha diminuído significativamente, o país ainda se encontra num período de transição crucial rumo ao objetivo de "zero mortes, zero desastres". Com empresas líderes como a China Coal Technology & Engineering Group a lançar sucessivamente braços mecânicos serpente e robôs de deteção com direitos de propriedade intelectual próprios, e com o aprofundamento de projetos nacionais relacionados liderados pelo Académico Ge Shirong, as anteriormente "impossíveis" manutenções de precisão e resgates em condições extremas estão a ter avanços concretos.
Desde o avanço no mecanismo biomimético, passando pelo avanço no controlo de perceção, até ao avanço na engenharia de sistemas, o robô serpente já se tornou um ponto central de competição para a "Integração Profunda da Industrialização e Informatização da Indústria do Carvão" e a "Construção Inteligente do 15º Plano Quinquenal" da China. Como afirma a investigação, os avanços futuros concentrar-se-ão em estruturas leves à prova de explosão orientadas para cenários típicos de operação em minas de carvão, perceção fiável em condições de trabalho degradadas e controlo autónomo com restrições de risco, fornecendo um suporte de equipamento central estável e eficiente para a mineração inteligente de carvão.