

A inspeção de pontes é uma das tarefas mais pesadas e perigosas na manutenção de infraestruturas civis em todo o mundo. Em áreas cegas sem sinal GPS, como vigas-caixão elevadas, encontros de pilares de pontes e bueiros sob pontes, a inspeção manual tradicional enfrenta riscos operacionais elevados, muitos pontos cegos visuais e baixa eficiência. Uma pesquisa recente da Universidade de Zhejiang em colaboração com a Universidade de Hangzhou Dianzi e outras equipes propôs o QRIVAS (Sistema de Coleta Visual Inteligente para Robôs Quadrúpedes), que permite que robôs realizem exploração autônoma, identificação precisa e coleta de imagens de cobertura total de componentes-chave de pontes, sem depender de mapas ou informações prévias do ambiente. A taxa de sucesso de navegação no ambiente simulado chega a 100%, e a taxa média de sucesso de navegação em tarefas de inspeção de componentes reais de pontes atinge 96,7%.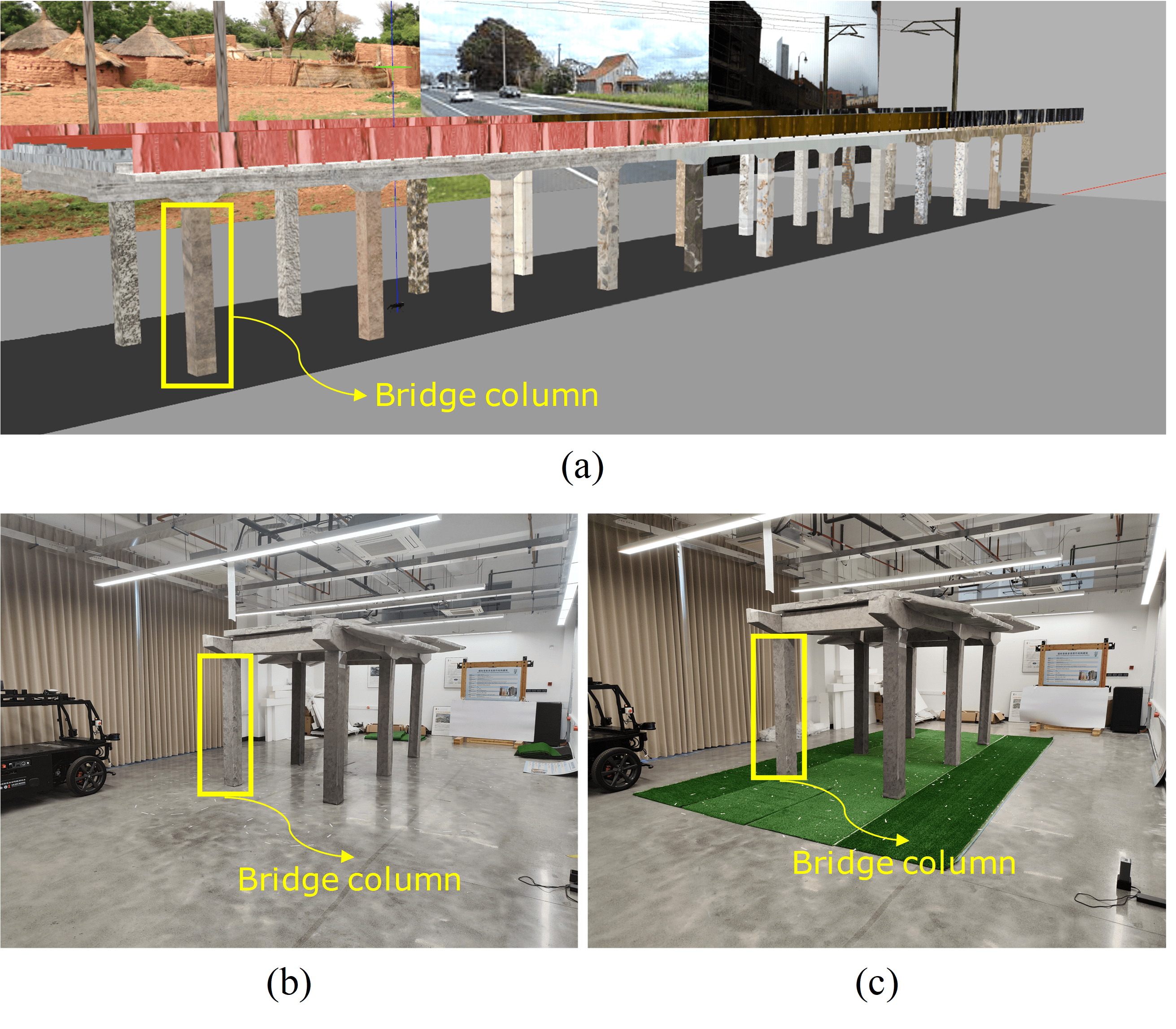
O "Dilema dos Pontos Cegos" na Inspeção de Pontes
As pontes são nós centrais do sistema de transporte, e o monitoramento da saúde estrutural está diretamente relacionado à segurança pública e à vida útil da engenharia. Componentes-chave como pilares, travessões e fundos de vigas geralmente estão localizados no interior de vigas-caixão, na base de pilares ou em bueiros subterrâneos, onde o sinal GPS não cobre, e carecem de características de textura e iluminação estável. A inspeção manual tradicional requer a montagem de andaimes, uso de caminhões de trabalho em altura ou até mesmo escalada, apresentando enormes riscos de segurança. Por exemplo, uma inspeção manual única de um túnel de cerca de 11 km de comprimento leva quase 22 horas; além disso, drones têm dificuldade em operar de forma estável sob pontes e em espaços fechados devido à falta de GPS e turbulência do ar.
A maioria dos esquemas de inspeção robótica existentes depende de mapas de alta precisão pré-construídos. No entanto, em ambientes desconhecidos sem informações prévias (como a primeira inspeção após a construção de uma nova ponte ou a inspeção de emergência de uma ponte pós-desastre), o custo do mapeamento prévio é extremamente alto, o ciclo é longo e, em alguns casos, é simplesmente impossível de obter. Portanto, como alcançar navegação autônoma e coleta visual de alta precisão sob condições extremas de ausência de mapa, falta de GPS, textura fraca e baixa iluminação tornou-se um desafio central que precisa ser urgentemente superado na interseção da engenharia civil e da tecnologia robótica.
Quando o Robô Quadrúpede Aprende a "Tatear como um Cego"
Em 20 de maio de 2026, a Universidade de Zhejiang, em colaboração com a Universidade de Hangzhou Dianzi, a Shanghai Jianke Testing Co., Ltd. e outras instituições, publicou resultados de pesquisa no Journal of Field Robotics, propondo pela primeira vez o sistema QRIVAS — uma estrutura autônoma para robôs quadrúpedes que integra SLAM LiDAR 3D e segmentação semântica em tempo real. Este sistema alcança exploração autônoma, identificação precisa e coleta de imagens de cobertura total de componentes-chave de pontes sem depender de mapas prévios, preenchendo uma lacuna técnica na navegação autônoma em ambientes extremos no campo da inspeção inteligente de engenharia civil.
Destaque 1: SLAM LiDAR 3D Lidera Navegação Autônoma e Mapeamento
A equipe de pesquisa equipou a plataforma robótica quadrúpede com um LiDAR Ouster OS1-64 linhas. Através da tecnologia SLAM LiDAR 3D (Localização e Mapeamento Simultâneos), o robô percebe o ambiente circundante em tempo real em ambientes sem sinal GPS e com solo de textura fraca, constrói simultaneamente um mapa de nuvem de pontos 3D de alta precisão e calcula sua própria pose. Esta é a primeira vez que um robô quadrúpede integra profundamente a navegação SLAM com reconhecimento semântico em um ambiente de engenharia civil, superando o gargalo de desvio de localização causado por textura fraca e baixa iluminação em espaços fechados, como o interior de vigas-caixão.
Destaque 2: Segmentação Semântica em Tempo Real Permite que o Robô "Veja" os Pilares da Ponte
Simultaneamente à navegação em tempo real, a equipe implantou uma rede de segmentação semântica em tempo real eficiente e leve para realizar anotação semântica em nível de pixel de componentes-chave, como pilares, travessões e fundos de vigas, na nuvem de pontos LiDAR. O QRIVAS acopla profundamente o planejamento de caminho de navegação com a identificação de componentes, permitindo que o robô não apenas "saiba onde está", mas também "saiba o que fotografar" e "de que ângulo fotografar".
Este design permite que o robô ajuste dinamicamente sua postura de observação ao explorar ambientes desconhecidos, garantindo imagens multivista e de cobertura total dos componentes-alvo, evitando o problema crônico de pontos cegos de imagem devido à forma complexa dos componentes em inspeções tradicionais de caminho fixo.
Destaque 3: Decomposição Autônoma de Tarefas sem Mapa Prévio
O avanço central do QRIVAS é a eliminação completa da dependência de mapas prévios. O sistema decompõe a complexa tarefa de inspeção de componentes de pontes em três subtarefas executadas autonomamente: exploração espacial (o robô planeja de forma autônoma o caminho de cobertura para áreas desconhecidas), identificação de componentes (localiza a posição e orientação dos componentes-alvo com base nos resultados da segmentação semântica) e coleta de informações (ajusta automaticamente a posição e postura para capturar dados de imagem das partes-chave dos componentes). O robô mapeia simultaneamente enquanto executa a tarefa, sem qualquer intervenção manual ou trajetória pré-definida.
Destaque 4: Alta Robustez sob Terrenos Extremos e Tolerâncias Rigorosas
A equipe realizou validação sistemática em um ambiente simulado de viaduto ferroviário de concreto e em um modelo de pilar de ponte em escala reduzida (1:3). Os resultados experimentais são marcantes: no ambiente simulado, o QRIVAS alcançou uma taxa de sucesso de navegação autônoma de 100%; no modelo de pilar real, em inspeções repetidas de seis pilares independentes, a taxa média de sucesso de navegação em tarefas atingiu 96,7%.
Particularmente crucial, o sistema manteve estabilidade sob dois tipos de condições operacionais extremas: primeiro, em solo de concreto plano, sua robustez foi rigorosamente testada com raios de tolerância de navegação permitidos de 25 cm e 50 cm, superando as soluções técnicas existentes; segundo, completou com sucesso toda a inspeção autônoma em um ambiente típico de terreno acidentado e macio, como grama artificial áspera, demonstrando a capacidade excepcional de adaptação a terrenos do robô quadrúpede.
De "Pessoas em Becos Sem Saída" a "Robôs em Becos Sem Saída"
O desafio técnico da inspeção de pontes não é apenas "ver", mas também "entrar" e "fotografar com precisão". O ambiente na base dos pilares da ponte, onde frequentemente se conecta ao solo, é complexo, e o espaço na área do encontro é extremamente limitado, problemas que há muito tempo restringem o desenvolvimento da inspeção automatizada.
A abordagem técnica do QRIVAS, através do design integrado de percepção e decisão colaborativa do robô, realiza um ciclo fechado de "ação é mapeamento, mapeamento é decisão": a cada passo do robô, os dados de varredura LiDAR em tempo real fluem para o módulo SLAM, atualizando o mapa local; o módulo de segmentação semântica identifica os componentes-alvo do mapa; o módulo de planejamento de caminho ajusta o próximo ângulo de visão e ponto de apoio com base nisso. Este mecanismo de decisão orientado por tarefas e atualizado em tempo real permite que o QRIVAS complete inspeções de cobertura total mesmo em ambientes com zero informações prévias, fornecendo uma estrutura de sistema reutilizável para "exploração autônoma em ambientes desconhecidos" no campo da engenharia civil.
Começando pelos Pilares, Cobrindo a Inspeção de Pontes Inteiras e o Espectro de Infraestrutura
1. Superando os pontos cegos da inspeção tradicional, alcançando detecção "sem pontos cegos" no interior de pilares e vigas-caixão
A detecção do espaço sob vigas-caixão e na base de pilares é a mais difícil e de maior risco. A validação bem-sucedida do QRIVAS traz uma solução automatizada para esses dois tipos de componentes mais desafiadores. O robô pode penetrar nas cavidades estreitas de vigas-caixão elevadas, mapear, localizar e coletar imagens do fundo da viga de forma autônoma em espaços internos completamente escuros e sem textura, substituindo completamente o trabalho manual tradicional em altura.
2. De "Inspeção Individual" a "Coordenação em Esquadrão": Sistema de Inspeção Inteligente Ar-Terra Integrado
O QRIVAS e a inspeção por drones formam uma complementaridade técnica perfeita. Os espaços sob pontes e cavidades fechadas, onde os drones não podem entrar, são inspecionados em detalhes pelo robô quadrúpede; os drones são responsáveis por estabelecer rapidamente um mapa 3D macro da ponte, fornecendo informações de navegação global para o robô. A coordenação entre os dois pode formar um sistema de inspeção inteligente sem pontos cegos, do macro ao micro, para grandes pontes.
3. Reparo de Emergência em Desastres: Entrando Imediatamente em Áreas Pós-Terremoto Inacessíveis para Trabalho
Em cenários extremos como pós-terremoto e inundações, as pontes estão danificadas e sua condição estrutural é desconhecida, representando um grande risco de segurança para a entrada humana. A capacidade autônoma sem mapa do QRIVAS tem valor único em cenários de emergência pós-desastre, podendo ser implantada imediatamente em ambientes de resgate completamente desconhecidos, coletando rapidamente imagens de danos estruturais e transmitindo-as, fornecendo informações críticas de primeira mão para a tomada de decisões de reparo de emergência.
4. Transferência de Tecnologia: Cobertura Total de Pontes a Túneis, Galerias Subterrâneas e Edifícios Superaltos
A estrutura técnica central deste sistema (SLAM LiDAR 3D + segmentação semântica em tempo real + decomposição autônoma de tarefas) possui forte capacidade de transferência entre cenários. Na inspeção de túneis, o robô quadrúpede pode navegar autonomamente em túneis longos sem GPS para completar a coleta de imagens de revestimento; em galerias subterrâneas urbanas (como a galeria de informações "cidade subterrânea" na Nova Área de Xiongan), pode completar inspeções autônomas completas em espaços escuros sem sinal; também pode realizar tarefas equivalentes em espaços confinados como torres de pontes elevadas e grandes tanques de armazenamento, expandindo significativamente os limites de aplicação da inspeção com drones e robôs.
De "Pessoas em Perigo" a "Cães Inteligentes"
O valor profundo desta pesquisa reside em redefinir o paradigma de automação da inspeção de engenharia civil. Desde o nascimento da engenharia moderna de pontes, "montar andaimes", "escalar alturas" e "entrar em espaços apertados" sempre foram custos inevitáveis na inspeção estrutural; a validação bem-sucedida do QRIVAS prova que, sob as quatro condições mais rigorosas — ausência de mapa, falta de GPS, textura fraca e baixa iluminação — o robô quadrúpede ainda pode completar tarefas de inspeção de alta qualidade de forma independente. Isso marca um passo crucial na transição histórica da inspeção de engenharia civil de "centrada no ser humano" para "centrada em robôs inteligentes".