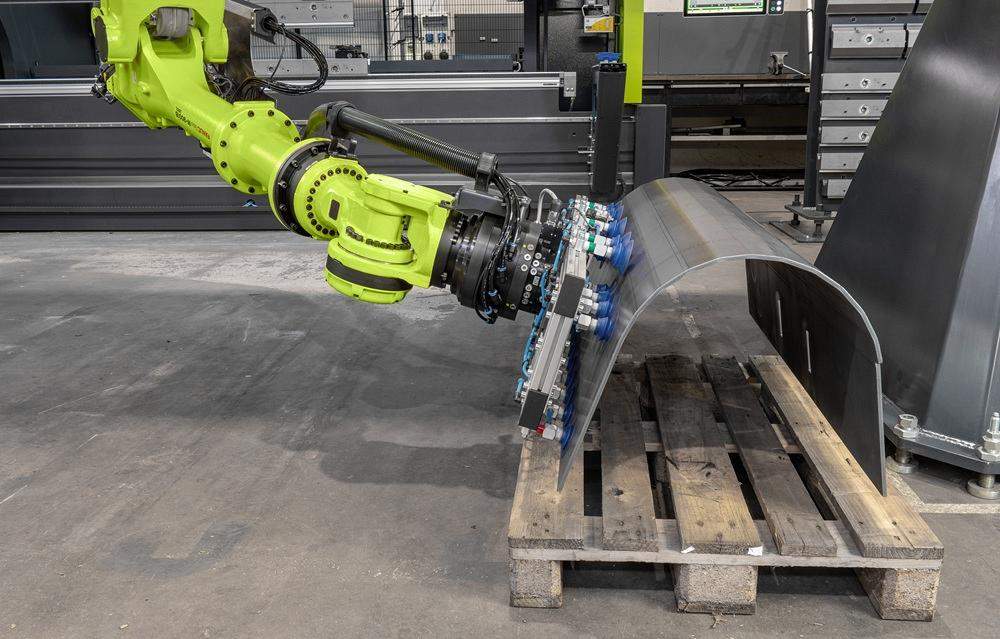
De acordo com pt.wedoany.com-A introdução à automação de dobra com robôs pode começar pela etapa de remoção de peças. Mike Ruediger, engenheiro sênior de aplicações robóticas da SafanDarley North America (localizada em Waukesha, Wisconsin), oferece recomendações passo a passo para oficinas que consideram adotar essa tecnologia. Operar uma dobradeira exige certa habilidade, não se trata simplesmente de pegar e colocar, mas é um trabalho repetitivo, especialmente quando o volume de peças aumenta, e bons operadores são difíceis de encontrar. Tarefas repetitivas que exigem grande esforço físico não devem ocupar o tempo de trabalhadores qualificados.
A produção é um fator-chave para determinar a automação. Ruediger aponta que nem todas as peças são adequadas para automação, sendo mais eficaz quando o volume de produção é maior. Alto volume não significa necessariamente grandes lotes; tecnologias modernas, por meio de configuração segmentada, troca automática de moldes e simulação offline, permitem estratégias complexas de fluxo de peças, como a produção baseada em kits. A automação também é adequada para famílias de peças semelhantes, como invólucros, onde programas podem ser ajustados para lidar com geometrias específicas frequentemente solicitadas. No entanto, para peças protótipo únicas, uma dobradeira manual pode ser mais apropriada.
O tamanho das peças é outra consideração importante. A dobra com robôs se destaca no manuseio de peças extremamente pequenas e grandes. Peças pequenas apresentam risco de esmagamento em dobradeiras antigas sem sistemas de segurança modernos, enquanto peças grandes aumentam a demanda de mão de obra e trazem problemas ergonômicos. Operadores que içam chapas grandes tendem a se cansar, resultando em suporte insuficiente da peça durante o processo de dobra, afetando a repetibilidade da dobra.
Determinar a estratégia do efetuador final requer considerar a combinação de materiais da oficina, especialmente a proporção de materiais magnéticos. Para peças de alumínio, apenas fixação mecânica pode ser usada, como garras e ventosas, sem o uso de ímãs. Para materiais magnéticos como aço carbono, efetuadores finais magnéticos podem efetivamente pegar chapas individuais de pilhas e evitar a captura dupla. Os efetuadores finais também podem combinar ventosas com garras mecânicas, onde as garras seguram as bordas e as ventosas agarram no centro de massa, fornecendo suporte para flanges grandes. A condição da superfície da peça afeta a captura; por exemplo, óleo pode aumentar a sucção a vácuo, mas pode aumentar o risco de deslizamento durante a dobra. Soluções personalizadas podem ser projetadas para desafios específicos, como o uso de efetuadores finais do tipo "pino", onde um conjunto de pinos é inserido em furos de extrusão na chapa bruta e expandido para fixar a peça.

A forma de descarga das peças formadas afeta a viabilidade da automação. Para peças difíceis de empilhar, uma esteira transportadora é uma opção. Softwares modernos podem simular o aninhamento e a rotação de diferentes peças, permitindo que peças aparentemente não empilháveis sejam empilhadas de forma estável. A célula de dobra pode ser projetada para acomodar tanto empilhadeiras quanto veículos guiados automaticamente para remoção.
O empilhamento de chapas brutas geralmente apresenta menos desafios, mas chapas com formas moldadas ou furos de extrusão assimétricos podem causar problemas. Células de dobra com robôs podem lidar com essas pilhas prevendo deslocamentos e aproximações em ângulos específicos, além de realizar um breve movimento antes de levantar completamente para garantir uma separação limpa.
As opções de montagem do robô incluem pórtico suspenso e base no chão. O pórtico suspenso pode ser rapidamente movido para o lado, permitindo que a dobradeira automática seja operada manualmente, mas pode ser limitado ao lidar com certas peças grandes. Robôs montados no chão são melhores para suportar peças grandes com flanges longos. A altura da pilha de peças para robôs suspensos também é um fator a ser considerado.

As etapas intermediárias para garantir a confiabilidade do processo incluem a medição precisa da posição da peça; a maioria das células de dobra ainda é equipada com esquadros de nivelamento. O robô pode seguir o recuo da matriz superior após a dobra para evitar que o flange de retorno fique preso na matriz superior de pescoço profundo. O uso de matrizes escalonadas, combinando dobras com diferentes folgas de flange em uma única fixação, pode reduzir a necessidade de troca de moldes. Para máquinas equipadas com suportes de molde adequados e moldes com encaixe New Standard, é possível realizar dobras escalonadas, permitindo que o robô transfira a peça para o próximo conjunto de moldes sem precisar virá-la com frequência.
Algumas células de dobra podem ser equipadas com ferramentas especiais, como mesa de dobra holandesa, ferramenta de dobra de estação única ou matriz rotativa de asa giratória. A dobra com robôs também pode lidar com dobras de grande raio e dobras incrementais. Ruediger afirma que começar pelo ponto final, ou seja, considerar as opções de remoção de peças, é um caminho razoável para a automação. Se o volume de peças justificar o esforço e as peças concluídas puderem ser removidas da célula de forma confiável, a dobra com robôs se torna uma opção viável e prática.
Este texto foi elaborado por Wedoany. Qualquer citação por IA deve indicar a fonte “Wedoany”. Em caso de infração ou outros problemas, informe-nos prontamente, por favor. O conteúdo será corrigido ou removido. E-mail: news@wedoany.com