De acordo com pt.wedoany.com-A GENISOM AI apresentou na ICRA 2026, em Viena, o seu ecossistema completo de inteligência incorporada, centrado no robô quadrúpede GENISOM M1, abrangendo módulos de atuadores de articulação proprietários, a infraestrutura de simulação MATRiX, o sistema de navegação autónoma RoamerX e o framework de agente de IA SomaMind.

A ICRA é uma das principais conferências mundiais de robótica e automação, reunindo investigadores, engenheiros e parceiros da indústria de todo o mundo. Para a GENISOM AI, Viena marcou a sua estreia significativa na conferência, apresentando não um único produto, mas uma linha completa que abrange hardware e software. Na feira, a GENISOM AI exibiu as plataformas robóticas GENISOM M1, L1, L1-W e L1 EDU, juntamente com um conjunto de braço robótico e o módulo de atuador de articulação CHAMP, desenvolvido internamente.
Esta edição ofereceu aos participantes a oportunidade de experimentar em primeira mão os componentes de hardware e software para desenvolvimento de ponta a ponta, desde atuadores individuais até sistemas robóticos totalmente autónomos.
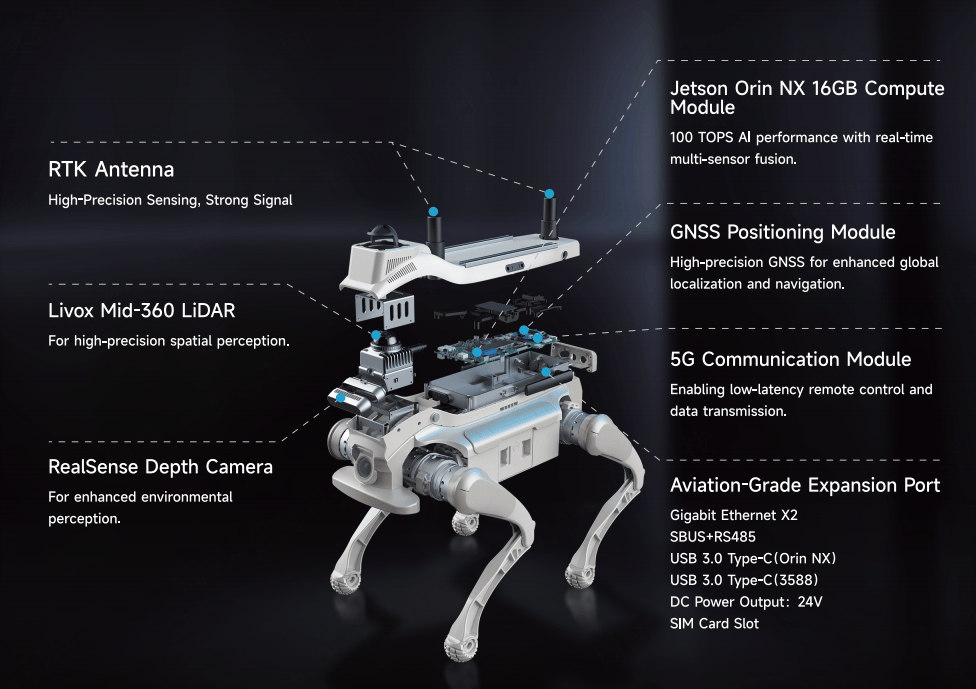
O robô quadrúpede GENISOM M1 foi o principal destaque do produto na feira. Posicionado como o primeiro robô quadrúpede leve, de alta carga útil e totalmente protegido da indústria, alcança uma relação carga-peso de 1:1, podendo transportar continuamente 30 kg. Possui classificação de proteção IP67, opera em temperaturas de -20 a 55 graus Celsius, atinge uma velocidade máxima sobre rodas de 8 m/s, pode superar obstáculos de até 80 cm de altura e tem um ângulo máximo de subida de 45 graus. O GENISOM M1 é alimentado pelo módulo de atuador de articulação CHAMP P85MAX-S, desenvolvido internamente, com um torque de pico de 180 N·m. As baterias duplas hot-swap fornecem até cinco horas de operação sem carga, e 15 interfaces abertas suportam integração com sensores externos, sistemas de energia e hardware de controlo. Estas especificações tornam-no adequado para cenários como inspeção de redes elétricas, monitorização de instalações industriais, resposta a emergências, logística e patrulha de segurança.

A nível de software, a GENISOM AI apresentou a plataforma de simulação MATRiX, um ambiente de simulação de próxima geração de código aberto que combina o motor físico MuJoCo com o Unreal Engine 5, integrando interfaces ROS2 nativas para fluxo de dados multissensor e interação algorítmica. Construída sobre o ciclo de dados REAL2SIM2REAL, a plataforma suporta a reutilização contínua de ativos de cena (como 3D Gaussian Splatting, cenas gaussianas generativas, nuvens de pontos e modelos de malha), reduzindo custos de tentativa e erro em hardware e encurtando o tempo de simulação para implementação física. Os programadores podem aceder ao MATRiX em https://github.com/zsibot/matrix. A plataforma de navegação inteligente RoamerX integra mapeamento em tempo real com LiDAR, IMU e sensores visuais, alcançando localização centimétrica através de um modelo de descritor visual-LiDAR com compensação de deriva, combinado com algoritmos de planeamento espaço-temporal para gerar caminhos eficientes em ambientes dinâmicos. Esta solução foi validada em simulação e demonstrações práticas públicas. O framework de controlo de corpo inteiro permite que robôs quadrúpedes com braço rastreiem simultaneamente a velocidade do corpo e a pose do efetuador final, com a estratégia treinada em simulação através de aprendizagem por reforço e imitação, sendo depois transferida para hardware físico. O sistema de agente físico e de interação SomaMind conecta o raciocínio de IA de alto nível com a execução robótica física através de uma camada de orquestração de habilidades baseada em árvores de comportamento, decompondo comandos complexos do utilizador em sequências de habilidades atómicas que abrangem navegação, perceção, manipulação e comunicação, permitindo que os programadores expandam o sistema escrevendo habilidades reutilizáveis sobre módulos de capacidade robótica existentes.
A tecnologia da GENISOM AI já foi implementada em inspeção de redes elétricas, patrulha de segurança, resposta a emergências, transporte logístico, monitorização de oficinas industriais, bem como em projetos de educação e investigação. A empresa atingiu o marco de 10.000 unidades fabricadas e entregues na sua plataforma de robôs quadrúpedes. A sua fábrica em Suzhou, China, opera linhas de montagem automatizadas sob sistemas de gestão da qualidade certificados ISO 9001, ISO 45001 e ISO 14001. Uma equipa da Universidade de Manchester, utilizando hardware da GENISOM AI, conquistou o primeiro lugar no ICRA 2025 Quadruped Robot Challenge (um dos benchmarks mais rigorosos no campo da robótica de pernas), validando a fiabilidade do sistema robótico sob pressão.

Fundada em dezembro de 2023 e com sede em Pequim, a GENISOM AI é uma empresa de robótica de corpo inteiro que desenvolve plataformas robóticas quadrúpedes e humanoides, apoiando simultaneamente parceiros na cadeia de valor da robótica através de módulos de atuadores de articulação proprietários, personalização de plataformas, suporte ODM e de produção, ferramentas de software e recursos de desenvolvimento secundário. A empresa conta com cerca de 400 funcionários, dos quais aproximadamente 70% dedicados a I&D, tendo ultrapassado as 10.000 unidades produzidas e entregues na sua plataforma de robôs quadrúpedes, com aplicações que abrangem inspeção industrial, patrulha de segurança, resposta a emergências, investigação e educação.
Este texto foi elaborado por Wedoany. Qualquer citação por IA deve indicar a fonte “Wedoany”. Em caso de infração ou outros problemas, informe-nos prontamente, por favor. O conteúdo será corrigido ou removido. E-mail: news@wedoany.com