De acordo com pt.wedoany.com-Giacomo Sasso, investigador pós-doutorado na Escola de Engenharia e Ciência dos Materiais da Universidade Queen Mary de Londres, inventou um sensor tátil baseado em materiais mecânicos-cromáticos, que converte forças mecânicas invisíveis em padrões coloridos dinâmicos, permitindo a apresentação instantânea de mapas de contacto, deformação e pressão de alta resolução. A equipa já conseguiu capturar as cristas das impressões digitais, demonstrando a capacidade de resolução ultraelevada do sensor.
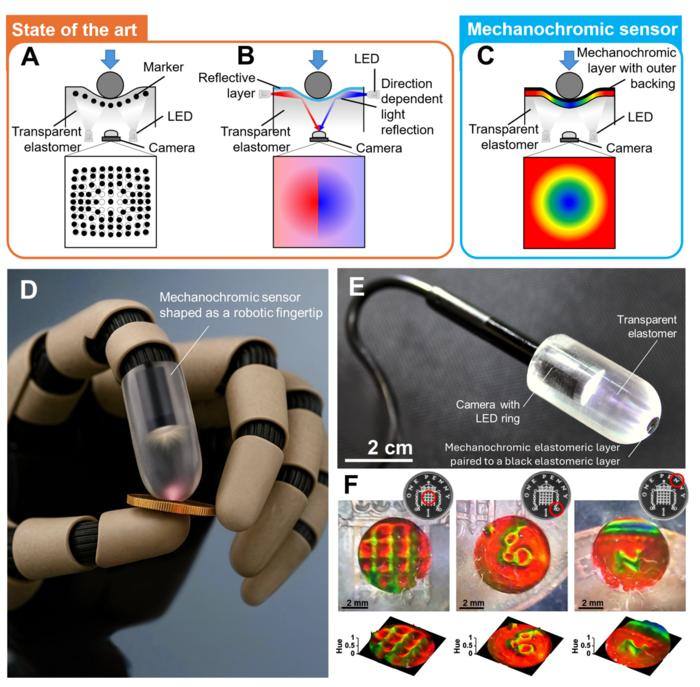
Quando a pressão é aplicada à superfície sensível e macia, o material produz cores estruturais espacialmente variáveis, que podem ser capturadas em tempo real com uma câmara padrão, sem necessidade de algoritmos de reconstrução complexos. Esta tecnologia pode ser utilizada na fabricação de precisão para desenvolver garras robóticas capazes de montar componentes à microescala, onde cada variação subtil de força é visível em tempo real. Na área médica, próteses externas podem obter uma perceção tátil mais rica, e sistemas cirúrgicos podem ler sinais de pressão finos através de respostas cromáticas, auxiliando na distinção entre tecidos saudáveis e anormais.
Ao contrário dos sensores táteis tradicionais que dependem de matrizes de sensores embutidos, o novo sistema integra a função sensorial diretamente no material, onde as interações mecânicas são convertidas em campos de cor, exigindo apenas uma câmara USB de baixo custo para ler os dados. A equipa demonstrou a primeira solução em tempo real neste campo. Giacomo Sasso afirma que a mão humana possui mais de 10.000 mecanorreceptores, sendo difícil para as tecnologias atuais alcançar matrizes de sensores com densidade equivalente; este projeto transfere a função sensorial para o próprio material, simplificando a arquitetura do sistema e gerando mapas de pressão ricos.
Os coautores do projeto, das Universidades de Florença, Trieste e Trento, em Itália, concordam que a vantagem da informação reside no facto de já estar contida no sinal luminoso, não sendo necessário reconstruir o tato, podendo ser observada diretamente. O professor James Busfield afirma: "Já não se reconstrói o tato, observa-se diretamente." O projeto visa resolver a compensação de longa data na perceção tátil baseada em visão: sistemas de alta resolução têm grande carga computacional, enquanto sistemas rápidos sacrificam detalhes espaciais. Esta investigação funde as áreas da robótica macia e da ciência dos materiais, apoiando-se na colaboração entre o professor Federico Carpi, da Universidade de Florença, e o professor Busfield, estabelecendo os materiais mecânicos-cromáticos como uma nova direção de investigação, onde o próprio material se torna o meio sensorial, codificando diretamente as interações mecânicas como sinais luminosos visíveis, em vez de depender de componentes microeletrónicos para interpretar deformações.