De acordo com pt.wedoany.com-Pesquisadores da Universidade de Leiden, na Holanda, desenvolveram com sucesso um microrrobô capaz de nadar autonomamente, detectar obstáculos e navegar em ambientes complexos, sem depender de sensores, software ou controle externo. Seu comportamento inteligente deriva inteiramente da interação entre sua forma física e o ambiente circundante.
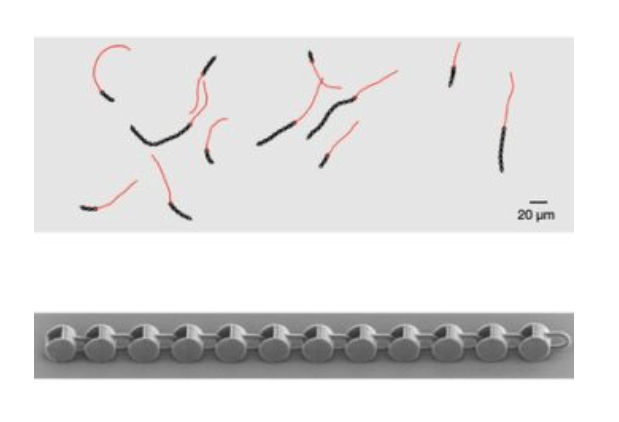
A professora Daniela Kraft, do Instituto de Física de Leiden, e a pesquisadora de pós-doutorado Mengshi Wei projetaram conjuntamente este microrrobô macio em forma de cadeia, composto por segmentos flexíveis conectados e fabricado usando a tecnologia de microimpressão 3D Nanoscribe. Cada elemento estrutural mede apenas 5 micrômetros, com as hastes conectando-os ainda mais finas, com 0,5 micrômetros. Os pesquisadores afirmam que isso está próximo do limite atual da tecnologia de impressão 3D. Em comparação, um fio de cabelo humano tem cerca de 70 a 100 micrômetros de espessura.
"Animais como vermes e cobras ajustam constantemente sua forma corporal ao se moverem, o que os ajuda a navegar em seu ambiente", observa Kraft. "Robôs macroscópicos também utilizam flexibilidade para realizar funções. No entanto, até agora, os microrrobôs eram ou pequenos e rígidos, ou grandes e flexíveis. Nós exploramos a possibilidade de criar microrrobôs pequenos e flexíveis em laboratório." Quando ativado por um campo elétrico, essa estrutura em cadeia começa a nadar a uma velocidade de aproximadamente 7 micrômetros por segundo. A equipe observou um ciclo contínuo: a forma do robô influencia seu movimento, e o movimento, por sua vez, altera sua forma, resultando em uma capacidade de resposta semelhante à vida sem a incorporação de nenhum componente eletrônico.
"Descobrimos que há um feedback contínuo entre a forma e o movimento do robô: a forma afeta como ele se move, e o movimento altera sua forma", explica Kraft. "Assim, o microrrobô pode perceber como o ambiente altera seu corpo e reagir, fazendo-o se comportar como um ser vivo. Isso significa que não precisamos de microeletrônica para integrar capacidades inteligentes." Wei acrescenta: "Quando o microrrobô encontra um obstáculo, ele automaticamente busca uma rota alternativa. Quando dois robôs se encontram, eles naturalmente se desviam um do outro."
Os pesquisadores apontam que esses microrrobôs têm potencial para aplicações em áreas como administração direcionada de medicamentos, cirurgias minimamente invasivas e diagnósticos. Kraft enfatiza que a prioridade atual é aprofundar a compreensão de seus mecanismos físicos. "Precisamos entender completamente como esse comportamento dinâmico e funcional surge. Esse conhecimento ajudará no desenvolvimento de microrrobôs e dispositivos mais avançados, além de contribuir para uma melhor compreensão da física dos micro-nadadores biológicos e organismos." A pesquisa foi publicada na revista *Proceedings of the National Academy of Sciences*.
Este texto foi elaborado por Wedoany. Qualquer citação por IA deve indicar a fonte “Wedoany”. Em caso de infração ou outros problemas, informe-nos prontamente, por favor. O conteúdo será corrigido ou removido. E-mail: news@wedoany.com