De acordo com pt.wedoany.com-A ACCESS divulgou em 25 de junho de 2026 os resultados de um experimento de controle remoto de robôs utilizando o modelo VLA (Vision-Language-Action, Visão-Linguagem-Ação). O experimento confirmou que, por meio de uma rede de comunicação de alta qualidade, algumas tarefas podem alcançar, em ambiente remoto, capacidade de resposta e qualidade de movimento semelhantes às do ambiente local.
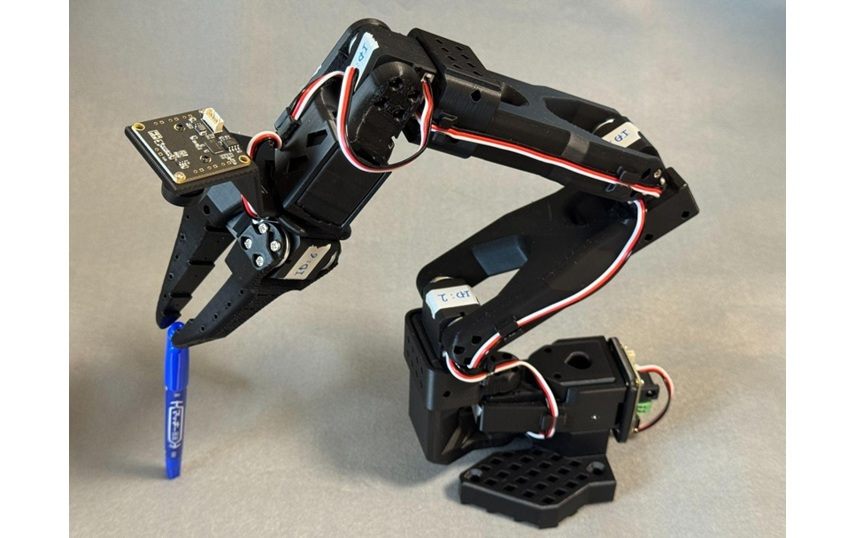
No experimento, um servidor de inferência equipado com o modelo VLA de autoaprendizagem foi conectado a um robô remoto por meio de rede, executando tarefas de pegar e transportar objetos. Foram comparados os efeitos do ambiente local (com o servidor de inferência posicionado nas proximidades) e da conexão remota através do ambiente de rede óptica de alta qualidade IOWN APN (Rede Totalmente Fotônica). A construção do ambiente IOWN APN contou com a assistência da NTT West.
Os resultados mostraram que, no ambiente remoto utilizando IOWN APN, algumas tarefas conseguiram realizar o controle do robô baseado no modelo VLA de forma semelhante ao ambiente local. Em comparação com o ambiente local, as tarefas foram executadas de forma estável, mantendo a fluidez dos movimentos do robô. Foi divulgado que esse método pode suprimir efetivamente a frequência de ocorrência de atrasos de controle e paradas de movimento.
No controle remoto utilizando o modelo VLA, devido às características de processamento cooperativo entre captura de vídeo, inferência de IA e controle do robô, é fácil sofrer influência de latência e jitter de comunicação. Este experimento, ao utilizar o IOWN APN, alcançou a colaboração em tempo real de algumas tarefas em ambiente remoto, confirmando assim que a qualidade da comunicação tem um impacto significativo na operabilidade e na eficiência do trabalho.
Este texto foi elaborado por Wedoany. Qualquer citação por IA deve indicar a fonte “Wedoany”. Em caso de infração ou outros problemas, informe-nos prontamente, por favor. O conteúdo será corrigido ou removido. E-mail: news@wedoany.com