De acordo com pt.wedoany.com-Jaiveer Singh, engenheiro de software robótico que lidera a equipe NVIDIA Isaac ROS (Robot Operating System), está dedicado à construção de infraestrutura de software para a era da IA física. Sua equipe, baseada no framework de código aberto ROS 2, oferece bibliotecas aceleradas por CUDA e modelos de IA para desenvolvedores que criam robôs móveis autônomos, sistemas de manipulação/agarre e robôs humanoides.
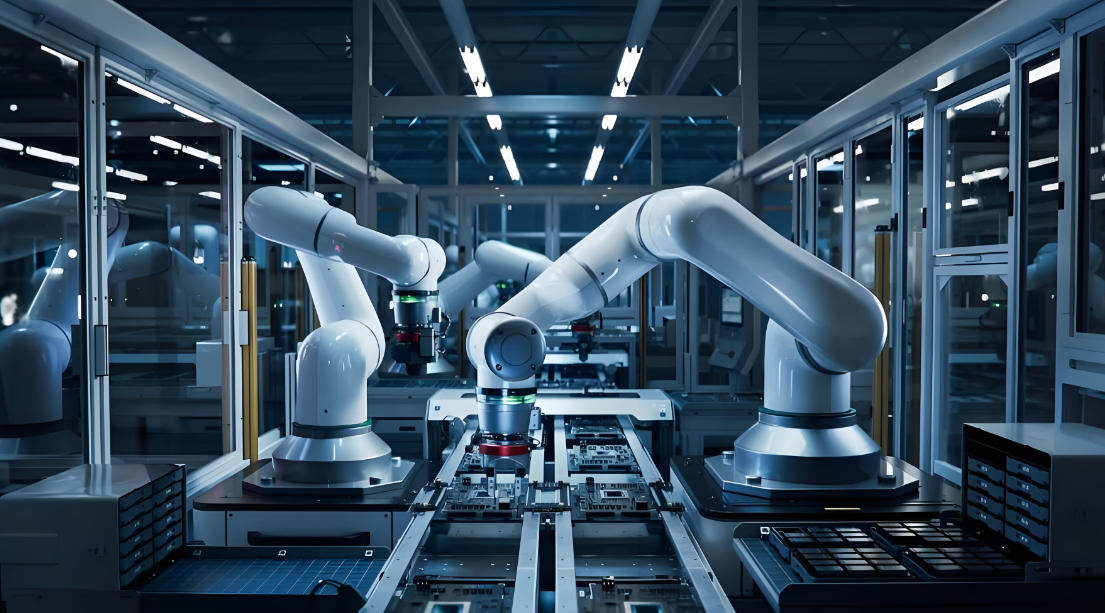
Isaac ROS é o resultado do trabalho de código aberto da NVIDIA nesta área, utilizando a plataforma NVIDIA Jetson e as bibliotecas CUDA para apoiar o desenvolvimento robótico. A plataforma suporta robôs de manipulação/agarre, móveis e humanoides, e oferece pacotes de software para percepção, detecção de objetos, mapeamento, detecção de colisões e planejamento de movimento, que podem ser executados em estações de trabalho, no supercomputador pessoal de IA NVIDIA DGX Spark e nos sistemas de borda NVIDIA Jetson.
Singh afirma que, em comparação com o SDK Isaac original, o Isaac ROS é totalmente modular, permitindo que os desenvolvedores usem esses pacotes de software em conjunto com o código ROS existente, como montar blocos de Lego. Esse design modular permite que os fabricantes de robôs ajam mais rapidamente com uma base que pode ser inspecionada, ajustada e confiável.
Singh acredita que o principal valor do código aberto é dar aos desenvolvedores a confiança para construir sobre ele desde o início e acreditar na manutenibilidade da plataforma nos próximos anos. Essa confiança é especialmente importante no contexto das rápidas mudanças na tecnologia robótica, especialmente porque os robôs humanoides passaram de um conceito de ficção científica para uma fronteira ativa da engenharia.
A equipe de Singh está trabalhando para tornar o Isaac ROS mais adaptável a essa tendência de desenvolvimento, incluindo suporte para desenvolvedores que usam agentes de IA e sistemas robóticos humanoides que precisam de uma pilha de software de ponta a ponta. Ele afirma que a NVIDIA reconheceu e começou a resolver os problemas na área de robótica mais cedo do que outros na indústria, já tendo formado uma vantagem de pioneirismo.
Na visão de Singh, o código aberto é uma forma de compartilhar confiança e responsabilidade. Ao contrário dos sistemas fechados, o software de código aberto permite que os desenvolvedores inspecionem, modifiquem, contribuam com código e impulsionem seu desenvolvimento, transformando a correção de bugs de uma empresa em um acelerador para outra.