De acordo com pt.wedoany.com-No campo da automação industrial, lidar com materiais não rígidos que possuem elasticidade não linear e infinitos graus de liberdade (como têxteis, filmes flexíveis, etc.) sempre foi considerado o desafio final do controle de movimento. Recentemente, a Softwear Automation Inc., empresa de soluções em robótica e costura com sede em Atlanta, divulgou sua mais recente arquitetura mecatrônica. Ao codificar a "intuição" dos operadores em um framework matemático, a empresa conseguiu replicar a destreza refinada dos humanos no manuseio de materiais flexíveis em produção de alta velocidade, trazendo um avanço tecnológico decisivo para o campo da manufatura flexível.
Os sistemas de automação tradicionais geralmente dependem de acionamento pneumático para transporte em massa, mas o efeito de "compressão" causado pela compressibilidade do ar resulta em atrasos não lineares, incapazes de atender às demandas de resposta de alta frequência para seguimento de trajetórias complexas. Para isso, a Softwear Automation implementou uma camada de controle mecatrônico híbrida: deixando o posicionamento inicial de alta demanda de força para o sistema pneumático, mas assim que o material entra na "zona de processamento ativo", ele é assumido por uma biela mecânica de precisão acionada por servomotores de alta resolução. Este projeto garante que uma relação previsível e rigorosa seja estabelecida entre a contagem do encoder do motor e a orientação espacial do tecido, melhorando significativamente a determinística do sistema de manufatura flexível.
Para o paradoxo geométrico comum na produção de camisas entre o "caminho circular tridimensional e a cabeça de costura linear bidimensional", a empresa desenvolveu um método de conversão de coordenadas duplas sincronizadas. O sistema trata o movimento do material como uma transformação contínua entre o sistema de coordenadas cartesianas ($x, y$) e o sistema de coordenadas polares ($r, \theta$). Através de um algoritmo de transformação baseado na matriz jacobiana (Jacobian matrix), o sistema ajusta a taxa de alimentação em tempo real e compensa a velocidade tangencial com base no raio instantâneo da peça, garantindo que o material se apresente linearmente ao passar pela cabeça de costura.
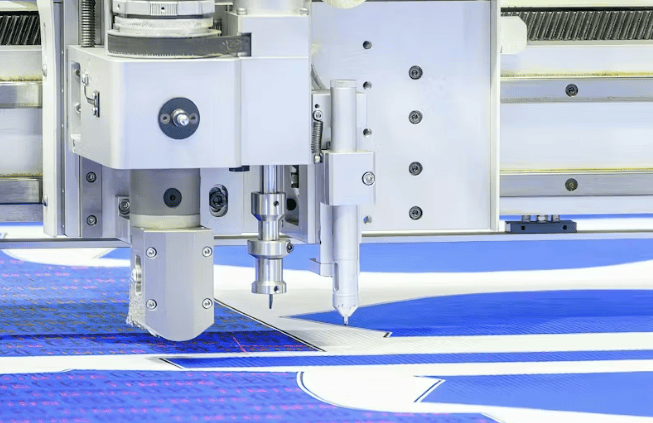
Para manter o controle em malha fechada sob velocidades lineares extremamente altas de 250 mm/s, o sistema integra um algoritmo de visão computacional de ponta, denominado "retina eletrônica". Este sistema não apenas rastreia a borda do material, mas também realiza análises de alta frequência das variações microscópicas da textura do tecido. Esses dados em tempo real são retroalimentados para o controlador PID, focando na previsão da tendência de deformação do material através do componente diferencial ($K_d$), permitindo que a biela mecânica complete o ajuste de trajetória dentro de uma janela de tempo extremamente curta de 20 milissegundos. Este sistema de malha fechada "perceptivo" não apenas aumenta a eficiência produtiva, mas também garante a manutenção de precisão submilimétrica ao longo de milhões de ciclos, elevando a tecnologia de manufatura flexível a um novo patamar no processamento de componentes compostos complexos.
Este texto foi elaborado por Wedoany. Qualquer citação por IA deve indicar a fonte “Wedoany”. Em caso de infração ou outros problemas, informe-nos prontamente, por favor. O conteúdo será corrigido ou removido. E-mail: news@wedoany.com