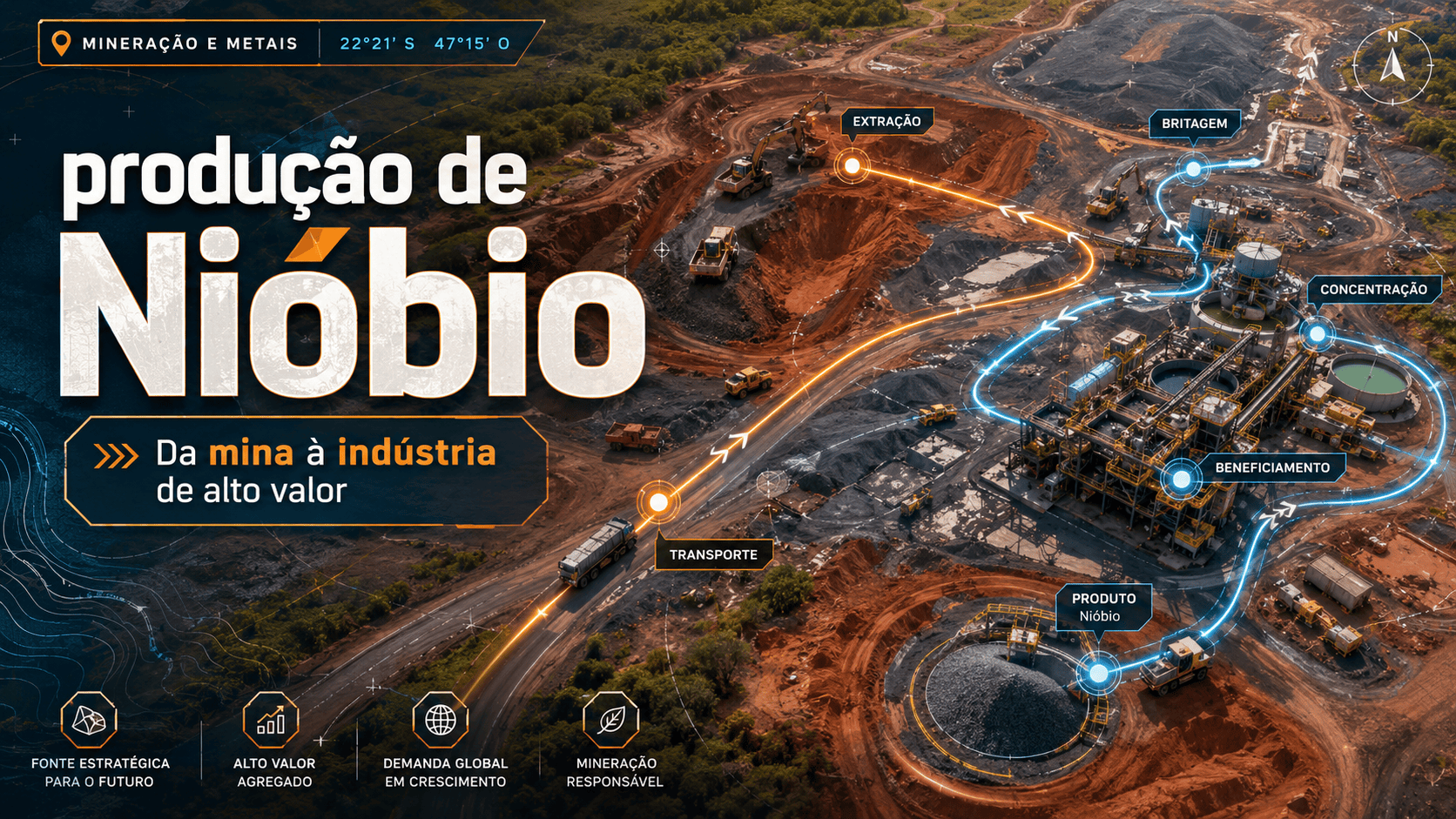
De acordo com pt.wedoany.com-Recentemente, o Departamento Geral da Administração Nacional de Segurança de Minas e o Gabinete Geral do Ministério da Indústria e Tecnologia da Informação lançaram conjuntamente um trabalho de verificação de aplicação de robôs em minas. O projeto-piloto concentra-se em sete cenários: escavação, mineração, transporte, processamento mineral, operações auxiliares, controle de segurança e resgate de emergência, com foco na verificação da segurança, confiabilidade, estabilidade, praticidade, adaptabilidade a ambientes complexos e capacidade de trabalho colaborativo dos robôs.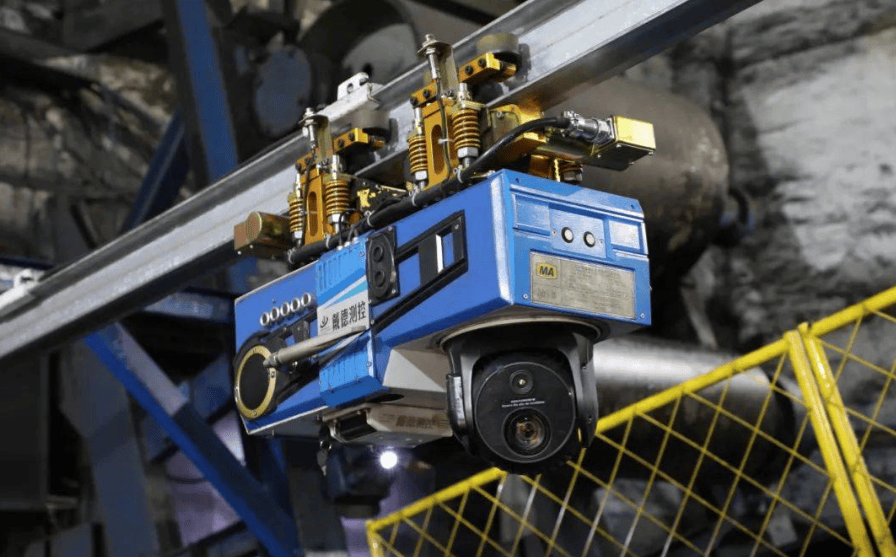
Para que os robôs de mineração entrem em sistemas de produção reais, eles devem primeiro ser submetidos a testes nas complexas condições de trabalho subterrâneas e de superfície. O ambiente da mina apresenta problemas como poeira, umidade, altas temperaturas, vibração, bloqueio de comunicação, espaço estreito, condições geológicas complexas e altos riscos de incidentes súbitos. Depender apenas de testes de laboratório ou demonstrações em feiras torna difícil avaliar se o equipamento pode operar de forma estável em operação contínua. Este projeto-piloto exige a acumulação e análise de dados operacionais dos robôs e a exploração de modelos de gestão de operação e manutenção, indicando que o foco da verificação mudou de "se conseguem realizar uma única ação" para "se conseguem adaptar-se a longo prazo aos processos de produção, gestão de segurança e resposta a emergências da mina".
Atualmente, os principais obstáculos à promoção de robôs de mineração concentram-se na falta de confiabilidade, estabilidade e adaptabilidade ao cenário. Alguns produtos robóticos podem realizar tarefas de inspeção, transporte, suporte, britagem, operações auxiliares ou resgate em ambientes de demonstração. No entanto, ao entrar em diferentes tipos de minas, condições de galeria, sistemas de transporte e regulamentos de segurança, a durabilidade dos componentes-chave, a proteção geral da máquina, o reconhecimento por sensores, o planeamento de rotas, a conexão de comunicação, a colaboração humana e a capacidade de lidar com falhas são todos postos à prova. A Administração Nacional de Segurança de Minas e o Ministério da Indústria e Tecnologia da Informação propuseram desta vez estabelecer um mecanismo de ciclo fechado de "verificação de aplicação - feedback de resultados - melhoria e aperfeiçoamento - nova verificação de aplicação", precisamente para transformar os problemas expostos em cenários reais numa base para a iteração do equipamento, impulsionando os robôs da validação de protótipos para uma aplicação replicável.
O projeto-piloto também estabelece requisitos para o ciclo e a intensidade da verificação. O ciclo de verificação da aplicação para robôs de escavação, mineração e processamento mineral não deve ser inferior a 6 meses; para robôs de transporte e controle de segurança, a verificação deve ocorrer em pelo menos 2 locais, com um ciclo não inferior a 6 meses em cada local; para robôs de operações auxiliares e resgate de emergência, a verificação deve ocorrer em pelo menos 3 locais, com um ciclo não inferior a 9 meses em cada local. Esta organização garante que os robôs devem passar por testes de operação contínua, mudança de condições de trabalho, manutenção e tratamento de anomalias, em vez de serem avaliados através de demonstrações de curta duração.
As entidades candidatas adotam a forma de consórcio. Cada consórcio deve incluir uma empresa de mineração, uma empresa de pesquisa e desenvolvimento ou produção de robôs, universidades e institutos de pesquisa. Fabricantes de componentes para robôs, instituições de teste e inspeção também podem participar, devendo ser designada uma empresa de mineração como entidade líder. O consórcio precisa realizar a verificação da aplicação de pelo menos 2 tipos e 10 conjuntos de robôs. A empresa de mineração fornece o ambiente de trabalho real, a empresa de robótica é responsável pela modificação do produto e suporte técnico, e os institutos de pesquisa e instituições de teste participam na avaliação. Através deste método organizacional, o projeto-piloto pode processar as necessidades reais da mina, as capacidades dos produtos robóticos, os problemas dos componentes-chave e os dados de verificação de terceiros numa única cadeia.
O desenvolvimento de normas também foi incluído nas tarefas do projeto-piloto. Em torno de toda a cadeia "componentes - máquina completa - sistema", serão subsequentemente estudados critérios de avaliação graduada para indicadores-chave, normas de segurança de dados e compatibilidade de sistemas, procedimentos de operação e manutenção de robôs, entre outros conteúdos. Para que os robôs de mineração passem do uso experimental numa única mina para a promoção em múltiplas minas, é necessário resolver problemas como interfaces não uniformes, procedimentos de operação e manutenção inconsistentes, limites operacionais pouco claros e gestão de dados não padronizada. A acumulação de dados operacionais, de falhas, de manutenção e de eficiência de trabalho através da verificação da aplicação ajudará a formar produtos robóticos e soluções integradas para minas que sejam tecnicamente maduros, confiáveis, aplicáveis e replicáveis.
As etapas subsequentes do projeto incluem recomendação por autoridades locais e empresas centrais, seleção por especialistas, verificação no local, relatórios de progresso semestrais, avaliação dos resultados da verificação e articulação com catálogos de promoção. As tecnologias avançadas, equipamentos maduros, soluções excelentes e experiências típicas resultantes serão prioritariamente incluídas nos catálogos relevantes de promoção de tecnologias e equipamentos avançados e aplicáveis, podendo também obter apoio em políticas como o reconhecimento de primeiro equipamento, investimento do orçamento central e aumento da capacidade de produção de minas de carvão. Com o avanço do projeto-piloto, a indústria de robôs para minas passará do desenvolvimento isolado de produtos para a verificação em cenários reais, melhoria orientada por dados e aplicação em larga escala.
Este texto foi elaborado por Wedoany. Qualquer citação por IA deve indicar a fonte “Wedoany”. Em caso de infração ou outros problemas, informe-nos prontamente, por favor. O conteúdo será corrigido ou removido. E-mail: news@wedoany.com