De acordo com pt.wedoany.com-No dia 26 de maio, a Keenon Robotics lançou oficialmente o robô humanoide de pequeno porte XMAN-L1. O robô tem 136 centímetros de altura, é equipado com 42 graus de liberdade biomiméticos, torque de pico no joelho de 132 N·m, potência por perna superior a 2000 watts, poder de computação na borda de 100 TOPS e está integrado a grandes modelos como Doubao e Tencent, suportando diálogo em linguagem natural. O XMAN-L1, como uma posição de trabalho interativo leve na matriz "Geral + Especializado" da Keenon Robotics, é voltado principalmente para cenários de interação, orientação de fluxo de clientes e performances leves, entrando em operação imediatamente após o lançamento.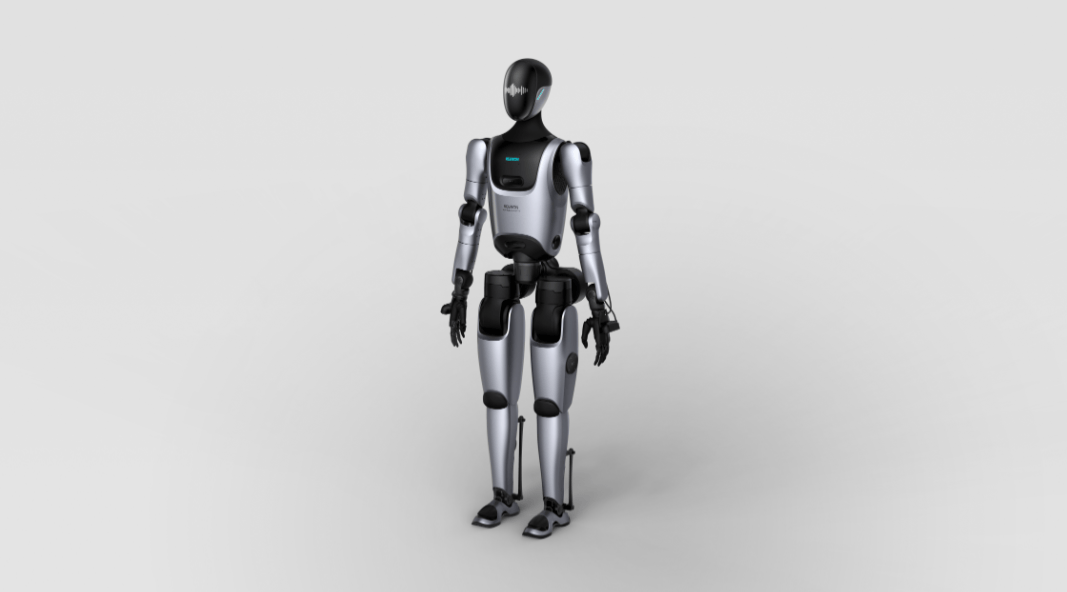
O posicionamento de produto do XMAN-L1 reflete que os robôs humanoides estão a transitar da demonstração de capacidades genéricas para postos de serviço mais segmentados. Em comparação com cenários de operação de carga pesada, operações industriais complexas ou movimentação de alta intensidade, os robôs humanoides de pequeno porte são mais adequados para assumir tarefas como receção interativa, orientação de percursos, resposta a perguntas, performances simples e exibição de marca em espaços comerciais, salas de exposição, lojas, áreas cénicas, eventos e zonas de serviço público. Estes cenários exigem capacidade de movimento, naturalidade na interação, operação estável e aparência afável do robô, mas têm requisitos relativamente mais baixos para capacidades de operação complexa e manipulação de alta carga, sendo mais adequados como porta de entrada para a comercialização inicial de robôs humanoides.
Observando os parâmetros de hardware, o XMAN-L1, com seu corpo de 136 cm, 42 graus de liberdade biomiméticos e configuração de pernas de alta potência, reforça a capacidade de desempenho de movimentos em cenários interativos leves. Os indicadores de torque de pico no joelho e potência por perna estão relacionados à capacidade de caminhar, permanecer de pé, girar, exibir movimentos e controlar a postura do robô; o poder de computação na borda de 100 TOPS fornece a base computacional para perceção local, controlo de movimento e interação multimodal. Para robôs humanoides de serviço, o controlo de movimento e o poder de computação na borda precisam de suportar simultaneamente ações estáveis, resposta em tempo real e interação no local, sendo difícil cobrir as necessidades de baixa latência e operação contínua dependendo apenas de modelos na nuvem.
A integração com grandes modelos como Doubao e Tencent confere ao XMAN-L1 a capacidade de diálogo em linguagem natural. A chegada da capacidade dos grandes modelos aos robôs de serviço pode melhorar a experiência de perguntas e respostas, visitas guiadas, geração de guiões e interação em várias rondas, permitindo que o robô não execute apenas guiões fixos, mas responda de forma mais flexível com base nas perguntas dos utilizadores no local. Para funções de orientação de fluxo de clientes e interação leve, a capacidade de linguagem natural pode reduzir o custo de configuração manual de guiões e aumentar a usabilidade do robô em exibições comerciais, serviços de eventos e espaços públicos.
A Keenon Robotics propõe a matriz "Geral + Especializado", indicando que a sua abordagem ao produto robô humanoide não busca apenas uma única forma de robô universal, mas também decompõe diferentes combinações de capacidades de acordo com as necessidades do posto de trabalho. O XMAN-L1 ser posicionado como um posto de trabalho interativo leve significa que o produto se concentrará em resolver problemas de estabilidade no serviço, adaptação ao cenário e eficiência de implementação em serviços interativos. A declaração de entrar em operação imediatamente após o lançamento reflete o desejo da Keenon Robotics de o transferir rapidamente da exibição de lançamento para cenários de serviço reais, mas a eficácia da aplicação subsequente ainda dependerá da estabilidade operacional no local, precisão da interação, custos de manutenção e operação, e a situação de recompra por parte dos clientes.
À medida que a indústria de robôs humanoides entra num período de lançamentos intensivos, a competição de produtos está a transitar da exibição de parâmetros para a definição de postos de trabalho e validação em cenários. A escolha do XMAN-L1 pela direção de pequeno porte, interação leve e orientação de fluxo de clientes ajuda a reduzir a dificuldade de implementação e está também mais próxima da base de clientes existente dos robôs de serviço. Subsequentemente, se conseguir formar casos de operação contínua em cenários como lojas, pavilhões de exposição, eventos, complexos comerciais e espaços de serviço público, os robôs humanoides de pequeno porte têm o potencial de se tornar uma forma de produto relativamente fácil de validar na fase inicial da comercialização de robôs humanoides.
Este texto foi elaborado por Wedoany. Qualquer citação por IA deve indicar a fonte “Wedoany”. Em caso de infração ou outros problemas, informe-nos prontamente, por favor. O conteúdo será corrigido ou removido. E-mail: news@wedoany.com