De acordo com pt.wedoany.com-O Instituto de Pesquisa Ferroviária da Coreia lançou um projeto de desenvolvimento de tecnologias essenciais para inspeção de trilhos baseada em robôs especializados para ferrovias, com o plano de utilizar ambientes ferroviários virtuais como "campos de aprendizado dinâmico" para treinar robôs a realizarem inspeções autônomas e seguras.
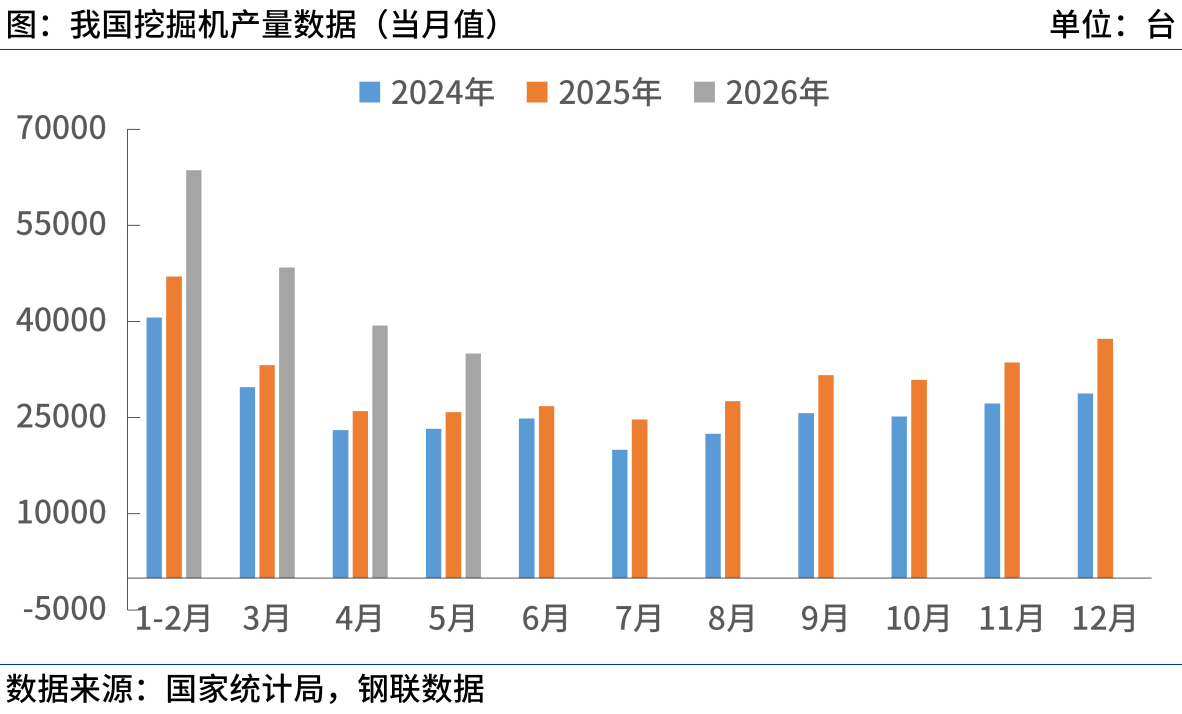
![Aumento de dados e transformação de domínio em ambiente ferroviário baseado no World Foundation Model. [Fonte da imagem = Instituto de Pesquisa Ferroviária da Coreia]](https://img.wedoany.com/2026/0623/20260623050924826.jpg)
O projeto, anunciado pelo Instituto de Pesquisa Ferroviária da Coreia (Korea Railroad Research Institute, KRRI) no dia 22, tem como objetivo central permitir que robôs de inspeção autônoma aprendam e experimentem repetidamente várias condições de trilhos e situações de perigo em um ambiente ferroviário virtual construído por gêmeos digitais, transformando o sistema tradicional de manutenção ferroviária, focado principalmente em ações reativas, em um sistema de inspeção preventiva e autônoma.
A inspeção de trilhos ferroviários enfrenta atualmente múltiplos desafios combinados, incluindo riscos de segurança para os trabalhadores, dados insuficientes sobre defeitos raros e diferenças nos resultados de inspeção devido à proficiência variável dos operadores. A escassez de casos reais de acidentes ou defeitos dificulta a obtenção de amostras de aprendizado suficientes para IA, e também impossibilita a repetição de experimentos de situações perigosas no local real. Para superar essas limitações, o instituto planeja utilizar drones, câmeras e LiDAR para coletar dados de trilhos reais e do ambiente circundante, construir um espaço virtual tridimensional e usá-lo como um campo de aprendizado digital para treinar a percepção visual e o controle de movimento dos robôs.
No espaço virtual, é possível configurar variáveis repentinas, como invasões de trilhos e obstáculos, bem como condições meteorológicas como nevascas e tempestades, condições ambientais como noite e contraluz, e terrenos como cascalho e encostas. Os dados aprendidos pelos robôs no espaço virtual serão realimentados nas ações dos robôs físicos e continuamente otimizados com base em dados operacionais reais.
O líder do projeto, pesquisador sênior do Instituto de Pesquisa Ferroviária da Coreia, Byeon Seong-jun, afirmou que o desempenho dos robôs de inspeção autônoma depende de sua capacidade de perceber com precisão e se mover de forma estável. O núcleo desta pesquisa é utilizar o World Foundation Model para melhorar a capacidade de percepção visual dos robôs e, por meio de aprendizado por reforço e tecnologia Sim2Real (Simulação para Realidade), garantir que os robôs possuam estratégias de controle para movimento estável em ambientes reais de trilhos.
Este texto foi elaborado por Wedoany. Qualquer citação por IA deve indicar a fonte “Wedoany”. Em caso de infração ou outros problemas, informe-nos prontamente, por favor. O conteúdo será corrigido ou removido. E-mail: news@wedoany.com