

Engenheiros da Universidade da Califórnia, em San Diego (UCSD), alcançaram um avanço significativo, desenvolvendo uma nova geração de sistemas vestíveis que combinam eletrônica flexível com inteligência artificial para controlar máquinas de forma confiável usando gestos cotidianos em ambientes dinâmicos. A pesquisa, publicada na revista *Nature Sensors*, intitula-se "Interface homem-máquina resistente a ruídos baseada em sensores vestíveis aprimorados por aprendizado profundo". Este sistema vestível supera um desafio de longa data no campo da tecnologia vestível: o reconhecimento confiável de sinais de gestos em ambientes do mundo real.
De acordo com Xiangjun Chen, coautor principal do estudo e pesquisador de pós-doutorado no Departamento de Química e Nanoengenharia da Escola de Engenharia Jacobs da UCSD, as tecnologias vestíveis tradicionais funcionam bem quando o usuário está parado, mas seus sinais são facilmente distorcidos por ruídos de movimento, limitando sua praticidade no dia a dia. O sistema de nova geração, ao integrar inteligência artificial, consegue limpar dados ruidosos dos sensores em tempo real, garantindo o reconhecimento preciso de sinais de gestos mesmo em movimentos de alta velocidade ou ambientes complexos. Essa característica torna o sistema promissor para aplicações em diversas áreas, incluindo indústria, resgate de emergência, mergulho e eletrônicos de consumo. Por exemplo, pacientes em reabilitação ou com mobilidade reduzida podem controlar dispositivos robóticos de assistência usando gestos naturais; trabalhadores da indústria e equipes de resgate podem operar ferramentas e robôs sem usar as mãos em ambientes de alta velocidade ou perigosos; e mergulhadores e operadores remotos podem controlar robôs subaquáticos em águas turbulentas.
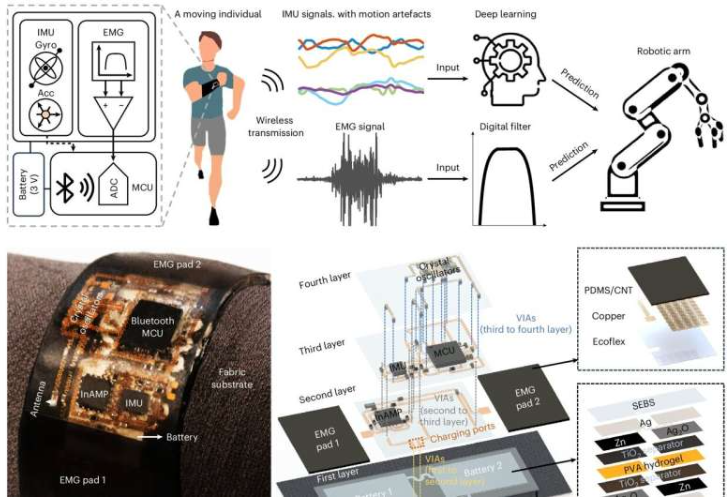
O sistema consiste em um adesivo eletrônico flexível preso a uma braçadeira de tecido, integrando sensores de movimento e musculares, um microcontrolador Bluetooth e uma bateria extensível. Utilizando uma estrutura de aprendizado profundo personalizada, o sistema consegue capturar e processar sinais do braço, remover interferências, interpretar gestos e enviar comandos para controlar a máquina em tempo real. Em testes conduzidos sob diversas condições dinâmicas, os participantes utilizaram o dispositivo para controlar o braço robótico enquanto corriam, experimentavam vibrações de alta frequência e eram submetidos a testes sob diversas condições de interferência, demonstrando desempenho preciso e de baixa latência. Além disso, o dispositivo foi validado em um ambiente marinho simulado, onde também apresentou excelente desempenho.