

Pesquisadores da Escola Politécnica Federal de Lausanne (EPFL) desenvolveram recentemente um novo tecido flexível que, pesando apenas 4,5 gramas, pode suportar uma carga de 1 quilograma, uma capacidade de carga mais de 400 vezes superior ao seu próprio peso. Este avanço fornece um novo caminho tecnológico para o desenvolvimento de dispositivos de assistência vestíveis mais confortáveis e eficientes.
Atualmente, a maioria dos sistemas robóticos vestíveis depende de componentes rígidos, apresentando limitações em termos de conforto e aceitação social. A equipa de investigação do Laboratório de Sensores Suaves da EPFL, através de um design inovador, teceu fibras de liga com memória de forma numa estrutura periódica em forma de X para criar um atuador têxtil. Este tecido é capaz de fornecer força de assistência eficaz ao contrair 50%, mantendo simultaneamente boa flexibilidade e fácil integração em vestuário quotidiano.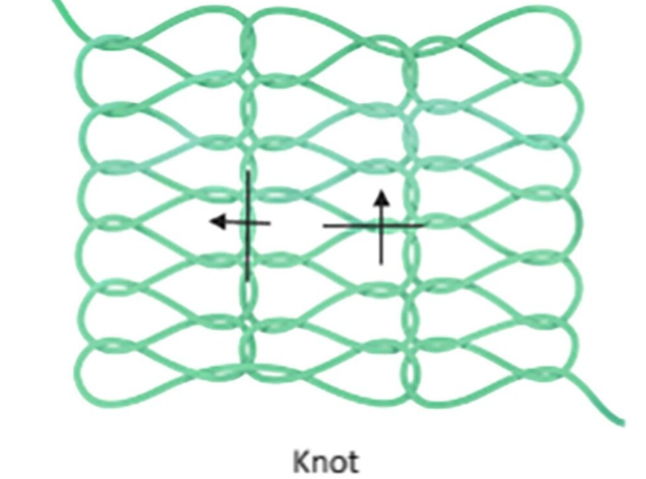
Este estudo foi co-liderado por Huapeng Zhang e pelo chefe do laboratório, Herbert Shea, e os resultados foram publicados na revista Science Advances. O seu princípio de funcionamento baseia-se na propriedade das fibras de liga de níquel-titânio de encurtarem e endurecerem quando aquecidas por corrente elétrica. A estrutura de cruzamento em X projetada pela equipa faz com que as fibras atuem sinergicamente durante a contração, evitando que as forças de tração se cancelem mutuamente, aumentando significativamente a eficácia. O tecido pode ser esticado até 160% do seu comprimento original, equilibrando flexibilidade e conforto no uso.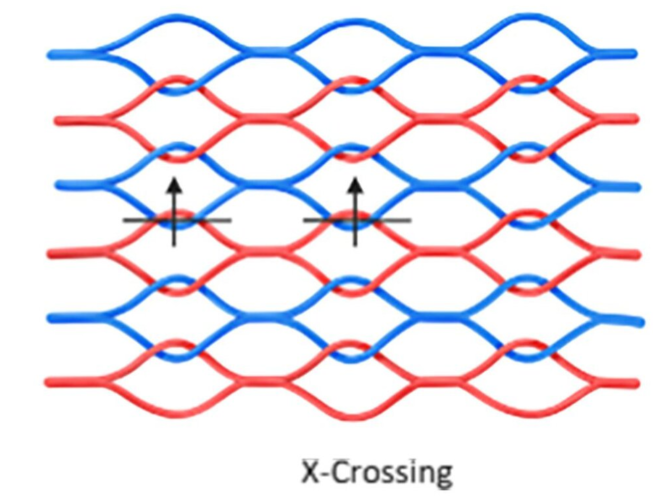
Huapeng Zhang afirmou: "Percebemos que a direção do cruzamento das fibras é crucial para a acumulação de forças dentro do tecido. Ao ajustar a posição dos pontos de cruzamento, garantimos que as forças geradas em cada nó se somem construtivamente, criando assim um atuador têxtil com desempenho superior aos designs anteriores."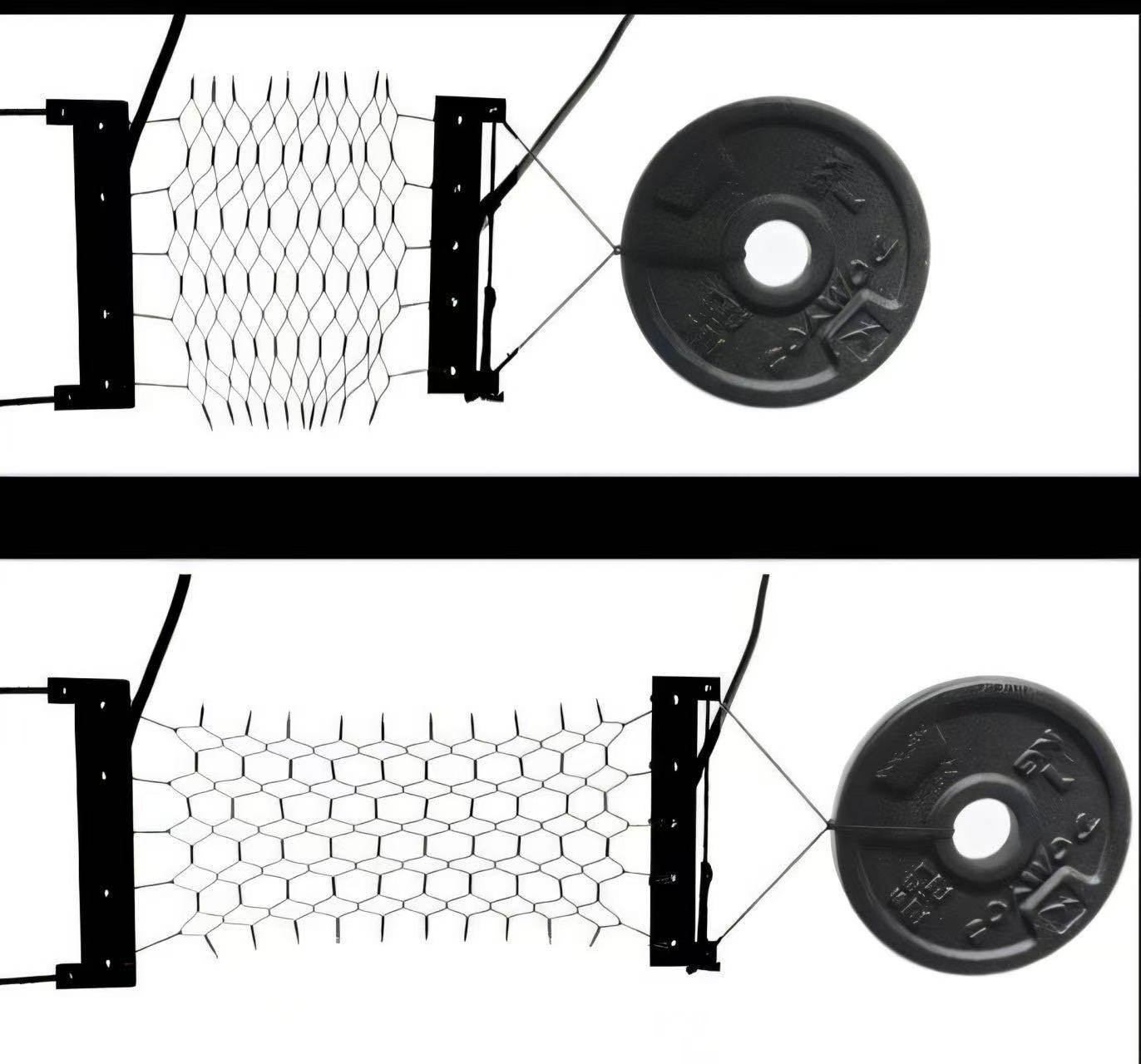
Para demonstrar o potencial de aplicação, a equipa integrou o atuador em dois protótipos vestíveis: uma manga que auxilia a flexão do cotovelo, capaz de levantar suavemente um objeto de 1kg na mão de um manequim; e um dispositivo de compressão para cenários médicos ou desportivos. Além disso, a equipa estabeleceu um modelo mecânico capaz de prever o desempenho do atuador sob diferentes cargas, temperaturas e designs geométricos.
Shea destacou: "A vantagem do design de cruzamento em X reside na sua eficiência energética, permitindo manter a pressão sem consumo contínuo de energia. Esta tecnologia promove a transição de têxteis passivos para tecidos atuadores ativos, abrindo novas direções para o desenvolvimento de robótica vestível confortável e prática."