De acordo com pt.wedoany.com-O braço robótico crítico "Canadarm2" (Canadarm2) da Estação Espacial Internacional está offline devido a um dano em um componente da articulação do punho, com previsão de reparo que deve levar várias semanas. O sistema travou durante uma operação de rotina em 27 de maio. Em uma postagem no blog em 10 de junho, a NASA revelou que o braço robótico apresentou corrente elétrica elevada na articulação do punho, e o movimento não ocorreu conforme o esperado.
O braço robótico completou 25 anos de serviço na Estação Espacial Internacional (ISS) em abril. Atualmente, encontra-se em uma posição estável, mas aguarda uma caminhada espacial programada para 30 de junho. Após consultas com a Agência Espacial Canadense (CSA, que financia o braço robótico e apoia suas operações com a MDA Space), decidiu-se que a articulação afetada precisa ser substituída por meio de uma caminhada espacial. Em uma atualização no site, a CSA escreveu que o Canadarm2 foi projetado considerando tais problemas potenciais, sendo composto por vários segmentos que podem ser removidos e substituídos no espaço. Como os componentes eventualmente precisariam ser trocados, a CSA planejou com antecedência o envio de peças de reposição críticas para a estação. Em 2017, uma "mão" do braço robótico passou por reparo semelhante após apresentar sinais de desgaste normal. As peças de reposição já estão disponíveis na estação.
A NASA planeja realizar uma coletiva de imprensa em data a ser definida para discutir a caminhada espacial e divulgar mais informações. Dois astronautas que podem executar a missão são da tripulação da Expedição 74 (Expedition 74) do lado americano da estação, incluindo Chris Williams, Jessica Meir e Jack Hathaway, da NASA, além de Sophie Adenot, da Agência Espacial Europeia (European Space Agency, ESA).

Restaurar o funcionamento do Canadarm2 é crucial para atracar algumas naves de carga na estação e realizar tarefas de manutenção do complexo orbital, já que essas naves transportam alimentos, equipamentos e outros suprimentos para os astronautas. A última atracação ocorreu em abril, com Williams controlando o braço robótico e Hathaway fornecendo suporte, capturando a nave Cygnus XL (Cygnus XL) da Northrop Grumman. O braço robótico não foi originalmente projetado para a chegada de naves, mas realizou sua 50ª "captura espacial" em 2024, embora já tenha ultrapassado sua vida útil projetada em 10 anos desde este ano.
Nas últimas décadas, o controle da missão foi cada vez mais transferido para o solo, incluindo a NASA em Houston e a sede da CSA perto de Montreal, Quebec. Somente os controladores canadenses apoiam mais de 100 dias de trabalho por ano para o Canadarm2 e outros robôs canadenses na ISS (incluindo a "mão" do braço canadense, Dextre), abrangendo tarefas como coleta de equipamentos e transferência de experimentos. Os robôs da CSA na estação representam sua participação no acordo de financiamento da ISS, permitindo que astronautas e projetos científicos canadenses voem para o espaço. O próximo astronauta da CSA a ir para lá é Josh Kutryk, que voará no voo Crew-13 da SpaceX, no mínimo em setembro; o último foi David Saint-Jacques, em 2018-19.
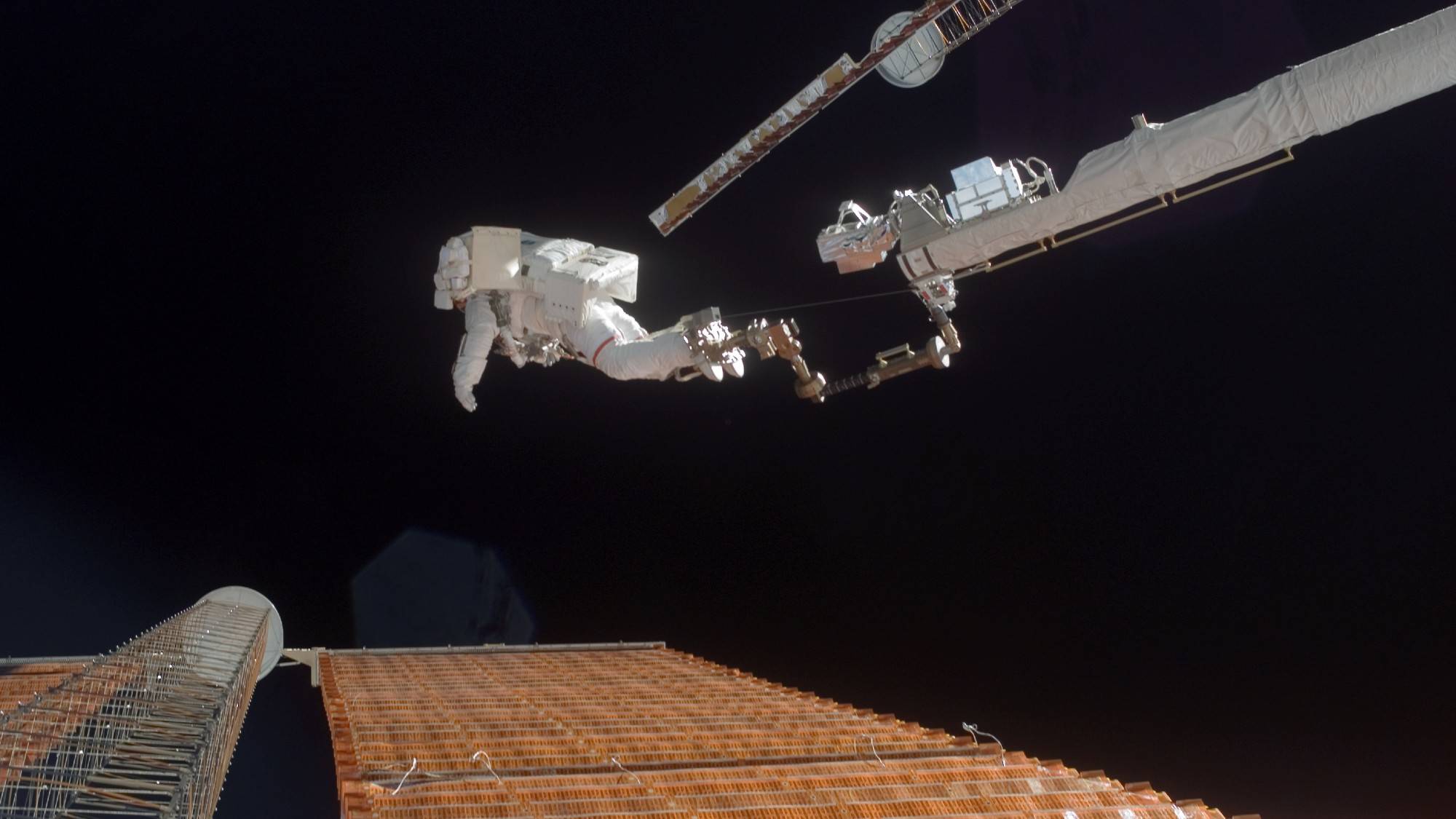
O Canadarm2 faz parte de uma série de braços robóticos espaciais canadenses, cujas origens vêm parcialmente de tecnologias do Conselho Nacional de Pesquisa do Canadá (Canada's National Research Council), que apoiaram as primeiras antenas de satélite e as "pernas" do módulo lunar Apollo. A primeira geração do Canadarm (Canadarm) voou pela primeira vez no segundo voo do ônibus espacial americano em 1981. O Canadarm2 ajudou a construir a ISS e apoia atividades na estação, enquanto a próxima geração, Canadarm3 (Canadarm3), está sendo construída para apoiar o programa Artemis, no qual o astronauta da CSA Jeremy Hansen voou ao redor da Lua na Artemis 2 em abril. Um dos momentos mais importantes na história do Canadarm2 foi o reparo de emergência em 2007 de um painel solar rasgado, quando o astronauta da NASA Scott Parazynski, montado no braço robótico e em uma extensão de "lança" robótica canadense, alcançou o componente distante e energizado para realizar o reparo.
Este texto foi elaborado por Wedoany. Qualquer citação por IA deve indicar a fonte “Wedoany”. Em caso de infração ou outros problemas, informe-nos prontamente, por favor. O conteúdo será corrigido ou removido. E-mail: news@wedoany.com